-
 河南固特機械鋼筋籠焊接工作站設備
河南固特機械鋼筋籠焊接工作站設備本品焊接質量好,無虛焊,質量可靠,精確控制焊接時間和焊接位置節省焊接材料。系統支持預設多組鋼筋籠規格參數,工人加工時直接調用數據使用觸摸屏一鍵操作,流水線式的工作方式簡單直觀,自動化程度高。產品質量完全達到規范要求。在實際手工生產鋼筋籠時工程監理幾乎每天都到加...
2025-05-08 -
 四川數控鋼筋加工機器人廠
四川數控鋼筋加工機器人廠本機器人使用鋰電池作為編碼器數據備份用電池?電池電量下降超過一定限度,則無法正常保存數據?電池每天8h運轉、每天16h停止工作的狀態下,應每2年更換一次。電池保管場所應選擇避免高溫、高濕,不會結露且通風良好的場所?建議在常溫(20±15℃)條件下,溫度變化較小...
2025-05-08 -
成都數控鋼筋籠焊接工作站怎么樣
報警信息及處理方法(1)氣缸報警報警邏輯:氣缸當前動作狀態(輸出)和氣缸感應器狀態(輸入)不一致達到一定的時間會出現此報警。導致報警原因:①、感應器位置異常;②、感應器損壞;③、有異物阻擋異常;④、氣壓(0.4-0.7MP之間)或氣缸或氣路異常;⑤、電磁閥異常...
2025-05-07 -
 山東全自動鋼筋加工機器人廠家直銷
山東全自動鋼筋加工機器人廠家直銷提示路徑所要執行之檔案不存在原因:此報警為在執行程序調用子程序時,不存在設定編號的子程序。(矩陣碼垛中經常有忽略末端效應器設置呼叫子程序的編號造成此警報)解決方法:1)檢查呼叫子程序的指令(檔案呼叫)中呼叫的子程序類型。類型有:程序列表,O檔,G檔。然后檢查設...
2025-05-07 -
 成都高速鋼筋加工輔助機器人修理
成都高速鋼筋加工輔助機器人修理潤滑油的檢查每運轉5,000小時或毎隔1年,請測量減速機的潤滑油鐵粉濃度。超出標準值時,有必要更換潤滑油,請聯系本公司服務中心。檢查工具:潤滑油鐵粉濃度計,推薦潤滑油鐵粉濃度計:型號OM-810;潤滑油的添加潤滑油的加油口位置;潤滑油的更換更換步驟如下:1)切...
2025-05-07 -
 四川固特機械數控鋼筋籠焊接工作站怎么樣
四川固特機械數控鋼筋籠焊接工作站怎么樣在沒有認真仔細閱讀本手冊之前,請不要隨意安裝、使用或對設備進行維修。重要提示:1、非正常的設備吊裝,可能造成人身傷害和設備損壞;2、設備放置平面應平整,否則設備傾覆可能造成人身傷害和設備損壞;3、設備供電應嚴格按照相關標準,否則可能造成人身傷害和設備損壞;4、...
2025-05-07 -
 天津鋼筋自動加工機器人批發
天津鋼筋自動加工機器人批發以機械代替人工、實現建筑施工自動化與智能化,是建筑施工領域的發展趨勢。到目前為止,這一趨勢已經在三個方面呈現出來:一是建筑施工的工廠化與裝配化,以鋼結構建筑為;二是在各個施工環節使用自動化施工機械,如自動砌墻機、自動抹灰機、自動噴涂機等;三是智能化施工機械和相...
2025-05-07 -
 河北箱梁生產線聯系方式
河北箱梁生產線聯系方式Revit自帶的鋼筋族很難完全滿足橋梁工程的配筋要求,因此,需通過自建“公制結構模型族”,再導入項目的方式建立梁中的鋼筋模型。以1號塊N6號箍筋為例:(1)在AutodeskRevit平臺下,創建“公制結構模型族.rft”族;(2)在“左”立面視圖中繪制如圖8...
2025-05-07 -
 天津數控鋼筋鋼筋籠焊接工作站價格
天津數控鋼筋鋼筋籠焊接工作站價格伺服電機回原點超時故障報警邏輯:執行伺服回原點動作后,到達設定的時間還是未完成回原點。導致報警原因:①、原點感應器異常;②、伺服電機連接運動結構的連接件損壞脫離;③、回原點速度過低;④、伺服電機異常;⑤、PLC輸出的脈沖和方向信號未到達伺服電機處。報警處理方法...
2025-05-07 -
 新疆全自動鋼筋加工機器人購買
新疆全自動鋼筋加工機器人購買信息說明:1、焊接機頭出:焊接機頭整體往外移動(通過氣缸控制)與機頭電動出示有區別的。焊接機頭出的行程是固定的,機頭電動出,行程是可以調節的。2、焊接機頭中間位:當點擊此按鈕時焊接機頭可以用手來回運動,焊接機頭沒有固定。3、焊接機頭回:同焊接機頭出原理一樣只是...
2025-05-07 -
 貴州地鐵鋼筋籠焊接工作站按需定制
貴州地鐵鋼筋籠焊接工作站按需定制節籠子參數設置頁面介紹:此頁面用來設置節鋼筋籠的相關參數,大致分為三部分,2\3\4\5節參數和節類似,后面不再一一講解。部分:主筋規格和長度規格:系統共設置了四種規格A、B、C、D。規格開關:用于選擇是否打開當前的規格,規格打開有一定的邏輯限制,,節時只有規...
2025-05-07 -
 山東固特鋼筋籠焊接工作站哪里買
山東固特鋼筋籠焊接工作站哪里買現場作業人員需要根據吊裝指揮的信號執行吊裝操作,指揮人員必須具備相關的從業資格,并經過培訓。每次吊裝都必須有專人指揮,操作人員對指揮信號不明確、不理解,都拒絕起吊。同時要避免多人指揮的情況,指揮信號一旦混亂就容易引發事故。風險3、吊埋在地下的物件這一操作是違背...
2025-05-07 -
 數控鋼筋籠焊接工作站聯系方式
數控鋼筋籠焊接工作站聯系方式伺服電機報警邏輯:系統未收到伺服電機報警的輸入信號會出現此報警。導致報警原因:①、由于過載等導致的伺服電機報警;②、由于線路異常導致的伺服電機報警;③、伺服電機未報警,由于信號線路導致的報警;④、其它原因導致的伺服報警。報警處理方法:此報警一般為機械結構異常導...
2025-05-07 -
 成都全自動鋼筋籠焊接工作站技術指導
成都全自動鋼筋籠焊接工作站技術指導在沒有認真仔細閱讀本手冊之前,請不要隨意安裝、使用或對設備進行維修。重要提示:1、非正常的設備吊裝,可能造成人身傷害和設備損壞;2、設備放置平面應平整,否則設備傾覆可能造成人身傷害和設備損壞;3、設備供電應嚴格按照相關標準,否則可能造成人身傷害和設備損壞;4、...
2025-05-07 -
 天津鋼筋加工輔助機器人
天津鋼筋加工輔助機器人設備供電連接焊接電源采用三相四線380V供電,滾焊機自動焊接機器人采用兩相220V供電;供電線路連接屬于特殊工種,非相關電工資質人員嚴禁私拉亂接。安裝要求:設備電纜連接前請仔細閱讀上圖,以確保設備的正常運作。接線不正確可能造成設備出現故障或者不按預期方式動作,...
2025-05-07 -
房建鋼筋籠焊接工作站維修電話
內圈液壓和中心小車手動操作:①手動強制開關:進行內圈液壓手動時,會有一定的限制條件,點擊此強制按鈕后,則屏蔽相應的條件,點擊此強制按鈕需要一定的權限。②安裝內圈:按照設定的安裝內圈時間,進行內圈液壓伸出動作。③內圈液壓伸出:手動進行內圈液壓的伸出動作。④內圈液...
2025-05-07 -
天津數控鋼筋籠焊接工作站維修電話
在沒有認真仔細閱讀本手冊之前,請不要隨意安裝、使用或對設備進行維修。重要提示:1、非正常的設備吊裝,可能造成人身傷害和設備損壞;2、設備放置平面應平整,否則設備傾覆可能造成人身傷害和設備損壞;3、設備供電應嚴格按照相關標準,否則可能造成人身傷害和設備損壞;4、...
2025-05-07 -
 貴州固特數控鋼筋籠焊接工作站設備
貴州固特數控鋼筋籠焊接工作站設備系統將信息輸入、參數設置權限和設備操作權限分離,并且在操作界面上對系統參數設置,工件加工規格信息輸入,和工人加工操作進行隔離,既避免了參數的誤修改,又保證了工人操作界面的清晰、簡潔。在產品規格無變化期間,設備可以實現一鍵自動運行,設備將自動進行全部焊接及檢測工...
2025-05-06 -
河南固特數控鋼筋籠焊接工作站聯系方式
鋼筋籠整體參數設置頁面介紹:節籠子主筋總根數:設置節鋼筋籠的主筋根數,比較大100根,小1根。每根籠子包含節數:每根鋼筋籠由N小節組成,比較大6節,小1節。同步加工鋼筋籠根數:設置同時加工的鋼筋籠根數,既先完成設置的節后,再繼續加工第二節,依照此順序直到加工完...
2025-05-06 -
貴州隧道鋼筋加工輔助機器人按需定制
本機器人使用鋰電池作為編碼器數據備份用電池?電池電量下降超過一定限度,則無法正常保存數據?電池每天8h運轉、每天16h停止工作的狀態下,應每2年更換一次。電池保管場所應選擇避免高溫、高濕,不會結露且通風良好的場所?建議在常溫(20±15℃)條件下,溫度變化較小...
2025-05-06 -
貴州房建鋼筋加工輔助機器人按需定制
產品具有如下特點:1、速度快:能完全匹配鋼筋籠盤絲機。2、質量穩定:機械化作業不受人為因素影響,長時間工作可穩定質量不變。3、適合各種主筋箍筋數量、形式、型號、大小、長度的設計要求,不會因設備功能而影響鋼筋籠設計和施工現場分散的機動作業。4、運轉便捷:組合式設...
2025-05-06 -
 貴州機場鋼筋加工輔助機器人維修電話
貴州機場鋼筋加工輔助機器人維修電話數都是直觀可測量的(產品調整后需設置的參數:鋼筋籠直徑、繞筋直徑、主筋數量、焊接時間)。在產品規格無變化期間,設備通過3個實體按鈕即可實現設備的全部準備工作,后續設備將自動跟隨鋼筋籠滾焊機的動作進行焊接,根據焊點大小焊接速度可100%跟隨滾焊機。且設備設計時按...
2025-05-06 -
 天津節省人工鋼筋加工智慧方案推薦廠家
天津節省人工鋼筋加工智慧方案推薦廠家除AGV原有的復雜計算以外,各種各樣的AI能力擴展成為可能。云化AGV架構如圖1所示。圖1云化AGV架構邊緣計算和云計算的結合將突破AGV終端的計算能力和存儲的限制,提高AI算法的訓練和推理能力,同時將大部分機器人智能布署在邊緣和云端,通過協作和不斷地訓練,持...
2025-05-06 -
四川固特鋼筋籠焊接工作站廠家直銷
相關介紹:布料和內圈安裝按鈕:主筋布料開始按鈕,用于啟動和停止布料程序,安裝內圈按鈕按鈕,用于當將內圈放置到內圈支撐上后,點擊此按鈕內圈支撐進行撐開動作,動作時間可在參數頁面內設置;⑨主筋相關操作按鈕主筋設置向導:點擊此按鈕后進入[主筋設置向導頁]頁面(如下圖...
2025-05-06 -
 天津固特數控鋼筋籠焊接工作站按需定制
天津固特數控鋼筋籠焊接工作站按需定制風險提示示例:指揮信號不明確現場作業人員需要根據吊裝指揮的信號執行吊裝操作,指揮人員必須具備相關的從業資格,并經過培訓。每次吊裝都必須有專人指揮,操作人員對指揮信號不明確、不理解,都拒絕起吊。同時要避免多人指揮的情況,指揮信號一旦混亂就容易引發事故。風險3、吊...
2025-05-06 -
 山東橋梁鋼筋籠焊接工作站生產廠家
山東橋梁鋼筋籠焊接工作站生產廠家繞主筋切換旋鈕:操作面板上的繞主筋切換旋鈕,需要切換到繞筋狀態;面板手自動旋鈕:操作面板上的手自動旋鈕,需要切換到自動狀態;故障中:表示設備當前處于報警中,需要進入報警頁面,根據報警信息解除故障;尾板在工作位:尾端支撐需要滿足翻轉在90度,升降在上位,既把中心...
2025-05-06 -
山東全自動鋼筋籠焊接工作站產品介紹
設備設計時按照7*24小時工作時間,極大的提高了生產效率,成為工程進度推進強有力的支持者。正常焊接過程中可以無需人員留守,從而使操作人員可以進行其它準備任務,降低工人的勞動強度。產品極強的智能化設計可極大的減少人員的誤操作,幾分鐘即可熟悉設備操作。成都華研機器...
2025-05-06 -
 湖南數控鋼筋鋼筋籠焊接工作站設備
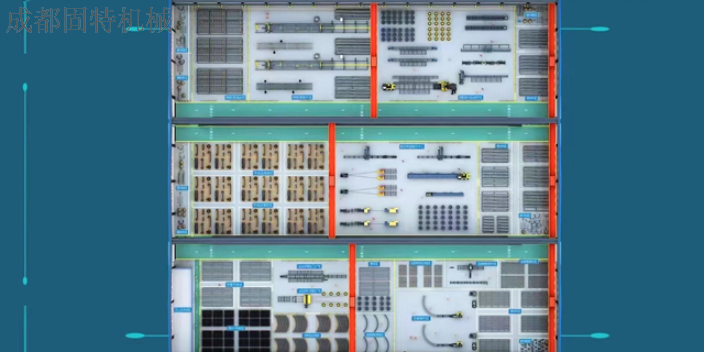
湖南數控鋼筋鋼筋籠焊接工作站設備全自動鋼筋籠焊接工作站GHZ25-12,主要分成四大功能區域:1、主筋上料、檢測焊接設備;2、鋼筋籠回轉設備;3、繞筋機和繞筋自動焊接設備;4、操作控制臺;設備總占地:長30米x寬8.5米;其中加工區域長17米,出籠區域長13米。圖中1、2區域設備可以完成鋼筋...
2025-05-06 -
 新疆固特數控鋼筋籠焊接工作站哪家強
新疆固特數控鋼筋籠焊接工作站哪家強繞主筋切換旋鈕:操作面板上的繞主筋切換旋鈕,需要切換到繞筋狀態;面板手自動旋鈕:操作面板上的手自動旋鈕,需要切換到自動狀態;故障中:表示設備當前處于報警中,需要進入報警頁面,根據報警信息解除故障;尾板在工作位:尾端支撐需要滿足翻轉在90度,升降在上位,既把中心...
2025-05-06 -
湖南固特數控鋼筋籠焊接工作站售后服務
在吊裝帶作業規范里有明確的要求:重物超過人頭不吊,吊物捆綁不牢、不穩不吊。一意孤行的操作則可能造成砸傷事故,損傷人和物,所以吊裝要盡量捆綁牢固,不要從人頭上過。現場作業人員需要根據吊裝指揮的信號執行吊裝操作,指揮人員必須具備相關的從業資格,并經過培訓。每次吊裝...
2025-05-06