山西協作機器人力控抓取
隨著PCBA生產線的規模不斷擴大和裝配工藝性能的提升,PCBA線束的裝配質量和效率變得越來越重要。PCBA線束裝配已經成為提升電子制造生產效率和產品質量的關鍵,其精確度和可靠性直接影響電子產品的性能。在傳統人工裝配過程中,PCBA線束組裝既耗時又費力,且易受人為因素影響,從而影響裝配質量和效率的穩定性。隨著工業自動化技術的進步,機器人在線束裝配領域的應用日漸增多。然而,機器人在精確控制力度和位置方面仍存在不足。為了確保每個連接點都達到高標準的質量要求,力控技術的引入顯得尤為重要。力控技術讓機器人能夠在高精度、高速度的條件下,完成復雜的線束裝配任務,減少人為干預,提高生產效率和產品質量。達寬科技的機器人力控系統已成功落地多家頭部汽車電子、工控機、服務器廠家,助力其精密裝配過程的自動化、智能化、數字化改造。機器人力控在減少誤差和提高產品一致性方面表現突出,達寬科技為客戶提供了強有力的技術支持。山西協作機器人力控抓取

機器人力控技術,也稱為力反饋控制技術,是指在機器人的操作過程中,通過將傳感器檢測到的力或力矩信息,反饋到控制系統,通過力控算法的解算,進而調整機器人的動作,以實現精確力控制的一種技術。想象一下,如果你的手能感覺到每一個細微的觸感,并根據這些觸感調整動作,這就是力控技術想要達到的效果。機器人力控技術的主要原理可以概括為以下幾個步驟:1,力覺感知:利用力傳感器檢測機器人與外界環境的交互力。2,信號處理:將感知到的力信號進行一系列的濾波處理,去除一些不必要的噪音,然后將信號傳輸到控制系統。3,控制決策:根據信號和預設的控制算法,計算規劃出機器人下一步的動作。4,執行動作:將控制指令傳遞給機器人的執行機構,實現精確的動作調整。青海工業機器人力控設計機器人力控技術讓生產線更加靈活,達寬科技的技術能夠實時響應變化,確保生產順暢。
素材六:機器人力控提升多任務處理能力機器人力控技術能夠讓機器人在執行多個復雜任務時保持高效和精確。傳統工業機器人通常只針對單一任務進行優化,而機器人力控通過動態調整機器人的施力和動作,使其能夠在不同任務之間靈活轉換,無論是精細裝配、力道控制還是碰撞避讓,機器人都能夠根據具體需求自動調整。這種多任務處理能力極大提升了生產線的柔性和適應性。達寬科技的機器人力控系統,不僅能夠應對不同類型的工作任務,還能夠優化工作流程,提高生產線的整體效率和多樣性,滿足客戶對生產靈活性和快速響應的需求。
隨著協作機器人(cobot)的普及,機器人與人類的合作已成為現代制造業的重要趨勢。機器人力控技術在這種合作中發揮著至關重要的作用。通過精確控制機器人施加的力量,機器人能夠更加安全、穩定地與人類操作員共同工作。機器人力控技術可以實時感知操作環境的變化,避免機器人與人類發生意外碰撞,從而保障員工的安全。同時,機器人能夠在需要時減小操作力,避免傷害。達寬科技的機器人力控系統提供了更為靈活的協作模式,使得機器人與人類之間的配合更加高效、和諧,為企業帶來更加智能化的生產環境。機器人力控技術能夠在多種應用場景下提供力學控制,達寬科技的系統有效提升生產效率與工作質量。

隨著PCBA生產線規模的不斷擴大,PCBA線束的裝配質量和效率變得越發重要,其精確度和可靠性直接影響電子產品的性能。對于使用傳統人工裝配廠商,PCBA線束組裝易受人為因素影響,影響裝配質量和效率的穩定性。對于自動化廠商,傳統機器人裝配在精確控制力度和位置方面仍存在不足,進而影響品控。在工業4.0的推動下,面對消費者對產品質量的日益增長的需求以及企業對成本效益的追求,無論是依賴人工裝配還是自動化流水線的制造商,如汽車電子、消費電子產品和航空航天設備等領域,都在尋求更高效、更穩定且良品率更高的PCBA線束組裝技術。怎么讓線束裝配在保證效率的前提下,提高裝配質量和良品率呢?眾所周知,PCBA線束的接口比較脆弱,容易損壞。且在裝配過程中可能出現的微小偏差和不規則性,例如線材的彎曲或配件的尺寸差異。為了應對這些問題,我們在多家頭部汽車電子、工控機、服務器等廠家的項目中,都采取了機器人柔性力控方案。通過達寬科技的機器人力控技術,企業能夠降低資源浪費,提升生產過程的經濟性和環保性。青海工業機器人力控設計
機器人力控技術不僅提高了生產效率,還增強了生產線的適應能力,達寬科技助力企業應對多變的市場需求。山西協作機器人力控抓取
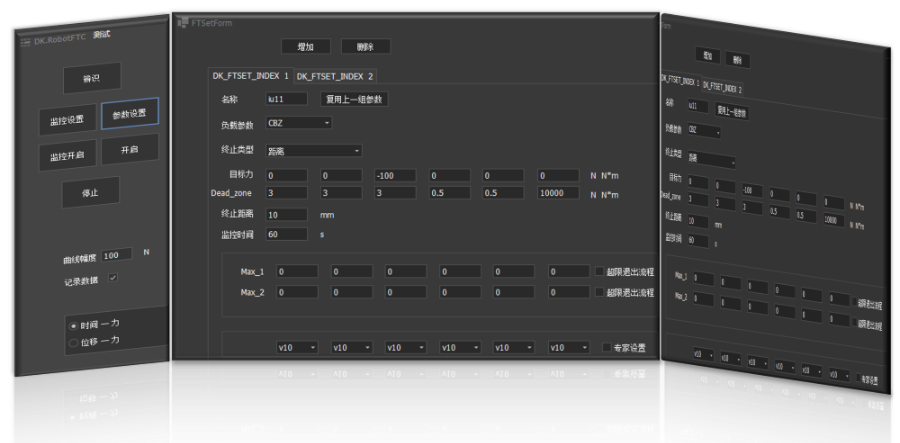
由于線束種類不同,接口不同,受力面的面數不同,所以每個種類的線束需要的力控參數是不一樣的,我們需要對每一類線束進行單獨設置。這樣,在接口裝配過程中,達寬機器人力控系統通過調整機器人的位置和姿態,還能更有效地減少由外力的干擾。在提供的GIF動畫中,我們可以觀察到達寬力控系統界面中,六維力曲線的實時變化,除了FX方向外,其他方向的力被有效抵消。為了避免因力過大導致接口損壞,就得讓機器人施加的力在安全閾值內。因此,我們可以引入力超限報警機制。考慮到不同線束接口的工藝差異,達寬科技的柔性力控系統設計了靈活的報警功能,允許在每個監測方向上設置兩級報警閾值,以提高報警功能的適應性。同時,我們設置了裝配時間超時報警,防止機器人裝配失敗且力還在安全閾值內時,時間過長的問題。我們還設置了超限自動退出功能。一旦監測到力超出預設的安全值或時間超時,系統將發出警報并自動停止裝配流程,從而保護接口,并提醒相關工作人員。山西協作機器人力控抓取
- 江蘇簡控力控系統優勢 2025-02-26
- 浙江機器人柔性力控系統供應商 2025-02-26
- 山西協作機器人力控抓取 2025-02-26
- 北京達寬科技力控系統定制 2025-02-26
- 中國香港簡控力控系統方案 2025-02-26
- 北京力控系統 2025-02-25
- 廣東智能柔性力控系統方案 2025-02-25
- 浙江打磨力控系統優勢 2025-02-25
- 江蘇新藍機器人力控系統軟件 2025-02-25
- 上海工業機器人力控搬運 2025-02-25
- 深圳電力線通信PLC芯片價格 2025-02-26
- 遵義餐飲企業短視頻營銷 2025-02-26
- 安徽充電模塊箱批發廠家 2025-02-26
- 黑河點餐小程序開發平均價格 2025-02-26
- CIARA ORION-HF310G4超頻服務器成本價 2025-02-26
- 浙江語音機器人供應商 2025-02-26
- 購買自媒體營銷推廣私人定做 2025-02-26
- 黔南州抖音短視頻矩陣營銷 2025-02-26
- 上海6U電池箱訂制 2025-02-26
- 福建卡車車載計算機 2025-02-26