實物機械手實訓(xùn)裝置電話
機械類機械制圖、AUTOCAD、機械設(shè)計、機械制造。電氣類電工技術(shù)、電子技術(shù)、單片機技術(shù)與應(yīng)用、PLC工業(yè)控制、自動化生產(chǎn)線裝調(diào)與維修、傳感器與檢測技術(shù)、電機拖動與自動化控制系統(tǒng)、液壓與氣壓傳動。機器人類工業(yè)機器人技術(shù)基礎(chǔ)、工業(yè)機器人操作與編程、工業(yè)機械手應(yīng)用、工業(yè)機器人系統(tǒng)應(yīng)用與維護、工控組態(tài)與現(xiàn)場總線技術(shù)、工業(yè)機器人應(yīng)用系統(tǒng)的三維建模、工業(yè)機器人工作站的系統(tǒng)集成、工業(yè)機器人智能視覺系統(tǒng)應(yīng)用。實踐與創(chuàng)新類機器人創(chuàng)新設(shè)計、工業(yè)機器人應(yīng)用方案設(shè)計、測繪實訓(xùn)、鉗工實訓(xùn)、焊接實訓(xùn)、數(shù)控編程實訓(xùn)、輪崗實訓(xùn)、機器人應(yīng)用實訓(xùn)、崗前綜合訓(xùn)練、頂崗實習、畢業(yè)設(shè)計。4職業(yè)面向據(jù)統(tǒng)計,安裝、調(diào)試、維護與保養(yǎng)工程師需求60%,集成設(shè)計工程師需求15%,仿真規(guī)劃工程師需求5%,營銷工程師需求20%。機械手實訓(xùn)裝置助力技能提升。實物機械手實訓(xùn)裝置電話

機器人實訓(xùn)平臺包含六自由度工業(yè)機器人、傳感器檢測系統(tǒng)、PLC控制系統(tǒng)及一套供料、輸送、壓鑄、焊接機構(gòu),可以實現(xiàn)對傳輸?shù)墓ぜM行碼垛、檢測、搬運、焊接模擬、壓鑄模擬等操作。VALENIAN-ABB機器人實訓(xùn)平臺各組件均安裝在型材桌面上,機械結(jié)構(gòu)、電氣控制回路、執(zhí)行機構(gòu)相對**,采用工業(yè)標準件設(shè)計。通過機器人實訓(xùn)平臺可以進行機械組裝、電氣線路設(shè)計與接線、PLC編程與調(diào)試、機器人編程等多方面訓(xùn)練,適合職業(yè)院校、技工學(xué)校自動化類相關(guān)專業(yè)《工業(yè)機器人與控制技術(shù)》、《自動化技術(shù)》等課程的實訓(xùn)教學(xué),適合自動化技術(shù)人員進行工程訓(xùn)練及技能比賽。新一代機械手實訓(xùn)裝置操作步驟操作機械手實訓(xùn)裝置能積累豐富經(jīng)驗嗎?

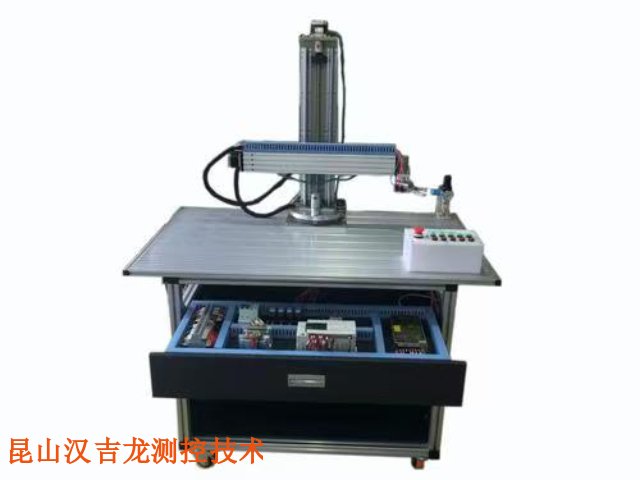
、機械手實驗裝置由底座、旋轉(zhuǎn)底座、氣動部分、三維(X、Y、Z)運動機械及電氣控制等四部分組成。氣動部分由電磁閥和氣缸組成。三維運動機械部分是一個采用滾珠絲杠傳動的齒輪傳動相結(jié)合的模塊化結(jié)構(gòu),用于實現(xiàn)定位功能。2、電氣控制由三菱可編程控制器(PLC自備),步進電機驅(qū)動器、電源、傳感器等組成。3、通過傳感器信號采集,PLC編程,實現(xiàn)對步進電機、直流電機、電磁閥進行較復(fù)雜的位置控制、時序邏輯控制及開關(guān)控制等功能。4、能完成PLC主機網(wǎng)絡(luò)及MCGS工控組態(tài)棒圖動態(tài)跟蹤實驗教學(xué)。二、通過編程,可實現(xiàn)如下實驗功能開機復(fù)位、橫軸前伸/縮回、豎軸上升/下降、底盤旋轉(zhuǎn)、手旋轉(zhuǎn)、手張開/夾緊,通過編程,使上述功能按一定順序排列即可完成將一定范圍內(nèi)的物品轉(zhuǎn)運到指定位置。小車運動控制系統(tǒng)實訓(xùn)教學(xué)模型
手動控制實驗●機械手左右移動●機械手上下移動●綜合控制●單步定距運行實驗●脈沖測量●單步定距運行●單步移位控制●單按鈕步序控制●多步定位運行實驗●定步運行實驗●定步取放控制●自動取放運行●自動運行控制●固定步序運行●連續(xù)定步運行●綜合控制實驗●定位取放實驗●氣動控制技術(shù)●步進電機控制,智能視覺系統(tǒng)實訓(xùn)裝置智能制造自動化實訓(xùn)臺機械手臂自動抓取機械裝調(diào)實訓(xùn)裝置自動化綜合實訓(xùn)裝置機械手示教器基礎(chǔ)操作,HOJOLO測控高質(zhì)量機械手實訓(xùn)裝置效果明顯。
存儲器:128MB閃存+64MB內(nèi)存8.亮度:300cd/m2工業(yè)機器人運動與組合虛擬仿真軟件可導(dǎo)入自由設(shè)計的模型,可通過該軟件使用圖形化編程、編輯和調(diào)試機器人系統(tǒng)來創(chuàng)建機器人運動,并模擬優(yōu)化現(xiàn)有機器人程序,也可以用于遠程維護和故障排除。
工業(yè)機器人多功能實訓(xùn)臺(ABB帶視覺)一、產(chǎn)品概述工業(yè)機器人實訓(xùn)平臺,以關(guān)節(jié)型六軸串聯(lián)工業(yè)機器人為**, 在操作平臺的四周合理分布有多種不同工藝應(yīng)用的實訓(xùn)模塊,包含了搬運碼垛工藝、分揀工藝、拋光打磨工藝、裝配工藝、焊接工藝等工業(yè)機器人**典型應(yīng)用,不僅滿足了職業(yè)院校不同專業(yè)學(xué)生針對工業(yè)機器人的操作 這機械手實訓(xùn)裝置真了不起!機械機械手實訓(xùn)裝置特點
機械手實訓(xùn)裝置價格多少錢?實物機械手實訓(xùn)裝置電話
工作站結(jié)構(gòu)認知 關(guān)鍵設(shè)備的特性和參數(shù)設(shè)置 工業(yè)機器人及周邊設(shè)備的維護及典型錯誤排查 工業(yè)機器人手動控制及基本參數(shù)設(shè)置 工業(yè)機器人IO通信及PLC信息交互 工業(yè)機器人單軸運動與線性運動控制 工業(yè)機器人工具TCP參數(shù)標定 工業(yè)機器人工件坐標系參數(shù)標定及多坐標系切換 基于關(guān)鍵點的軌跡編程(精確定位/圓弧逼近) 基于樣條曲線的軌跡編程 條件判斷語句的用法及編程 循環(huán)語句的用法及編程 子程序的編程及調(diào)用 模擬碼垛工藝應(yīng)用編程 模擬上下料工藝應(yīng)用編程 工業(yè)機器人與PLC的通訊與聯(lián)調(diào) 基于Prt工業(yè)機器人離線編程軟件的工作站模型環(huán)境搭建與配置 基于Prt工業(yè)機器人離線編程軟件的簡單平面軌跡離線編程應(yīng)用 基于Prt工業(yè)機器人離線編程軟件的模擬搬運碼垛離線編程應(yīng)用 基于P工業(yè)機器人離線編程軟件的模擬上下料離線編程應(yīng)用 基于Pt工業(yè)機器人離線編程軟件的寫字繪圖離線編程應(yīng)用實物機械手實訓(xùn)裝置電話
- 實物機械手實訓(xùn)裝置電話 2025-02-07
- 進口智能裝配機實訓(xùn)平臺系統(tǒng)檢測故障 2025-02-07
- 多功能智能裝配機實訓(xùn)平臺系統(tǒng)哪家好 2025-02-07
- 智能裝配機實訓(xùn)平臺系統(tǒng)現(xiàn)狀 2025-02-07
- 上料工業(yè)機器人技能考核實訓(xùn)臺裝置 2025-02-06
- 分煉工業(yè)機器人上下料教學(xué)實訓(xùn)平臺企業(yè) 2025-02-06
- 電機智能制造教學(xué)實訓(xùn)臺貼牌 2025-02-06
- 貴州機器視覺實訓(xùn)臺批發(fā) 2025-02-06
- 上海機器人焊接工作站實訓(xùn)平臺原理 2025-02-06
- 定制工業(yè)4.0智能制造實訓(xùn)系統(tǒng)怎么做 2025-02-06
- 生物細胞培養(yǎng)耗材應(yīng)用領(lǐng)域 2025-02-07
- 四川省成都市金牛區(qū)加固型地磅配件報價 2025-02-07
- 鍛造磁致伸縮傳感器結(jié)構(gòu) 2025-02-07
- 廣州LINS688B慣性導(dǎo)航模組 2025-02-07
- 實物機械手實訓(xùn)裝置電話 2025-02-07
- 廣東有哪些稱重模塊常見問題 2025-02-07
- 天津如何選ABB繼電器代理商 2025-02-07
- 山東滲透壓儀滲透壓儀廠家價格 2025-02-07
- 福建布魯克顯微CT配件 2025-02-07
- 西安埃賽力達超高速相機 2025-02-07