欽州發(fā)那科機器人
發(fā)那科機器人的偏移指令XYZ用法如下: 1. 偏移指令是一種相對于當(dāng)前位置進行運動的方式,可以在程序中使用。 2. XYZ分別表示三個坐標(biāo)軸:X軸、Y軸和Z軸。這些坐標(biāo)軸通常與機器人工作空間的不同方向相對應(yīng)。 3. 在編寫程序時,您可以使用偏移指令來控制機器人沿著某個特定方向進行運動。例如,如果您想讓機器人向前移動10毫米,則可以使用以下命令:`MOVEX 10` 這將使機器人沿著X軸正方向移動10毫米。 4. 您還可以同時在多個坐標(biāo)軸上執(zhí)行偏移操作。例如,如果您想要使機器人同時朝X、Y和Z方向各前進5毫米,則可以使用以下命令:`MOVE X 5 Y 5 Z 5` 這將使機器人沿著X、Y和Z三個坐標(biāo)軸正方向各前進5毫米。發(fā)那科機器人伺服電機運行異常故障分析維修。欽州發(fā)那科機器人
FANUC機器人的弧焊焊接速度可以直接在運動程序語句上指定,也可以通過焊接速度指令來設(shè)定。焊接速度指令可以將機器人運動程序語句中的速度指定為焊接條件中設(shè)置的焊接速度,這樣就可以將焊接電壓、焊接電流、焊接速度作為焊接條件統(tǒng)一進行管理。每次示教時,就不必在程序上單獨逐條設(shè)置焊接速度值了。通過將機器人運動程序語句中的運行速度變更為“WELD_SPEED”(焊接速度),可以使機器人按照指定的焊接速度進行焊接,其執(zhí)行的焊接速度是在本條運動程序語句之前的弧焊開始指令中焊接條件內(nèi)指定的焊接速度。要使用焊接速度指令,可以先將光標(biāo)移動到機器人焊接運動程序語句的運行速度上,然后按“F3焊接”,再按“ENTER”鍵,即可將速度值變更為焊接速度。當(dāng)遇到執(zhí)行單步運行、未執(zhí)行弧焊開始指令就執(zhí)行帶有焊接速度指令的運動語句、執(zhí)行后退運動的情形時,機器人不會按照焊接速度運行,而是按照在弧焊焊接系統(tǒng)設(shè)置畫面或弧焊焊接軟件設(shè)置畫面上設(shè)置的標(biāo)準(zhǔn)速度運行。欽州發(fā)那科機器人工業(yè)機器人常用的三種電機類型。

工業(yè)機器人的優(yōu)勢簡介 1.技術(shù)先進工業(yè)機器人集精密化、柔性化、智能化、軟件應(yīng)用開發(fā)等先進制造技術(shù)于一體,通過對過程實施檢測、控制、優(yōu)化、調(diào)度、管理和決策,實現(xiàn)增加產(chǎn)量、提高質(zhì)量、降低成本、減少資源消耗和環(huán)境污染,是工業(yè)自動化水平的蕞高體現(xiàn)。 2.技術(shù)升級工業(yè)機器人與自動化成套裝備具備精細制造、精細加工以及柔性生產(chǎn)等技術(shù)特點,是繼動力機械、計算機之后,出現(xiàn)的荃面延伸人的體力和智力的新一dai,生產(chǎn)工具,是實現(xiàn)生產(chǎn)數(shù)字化、自動化、網(wǎng)絡(luò)化以及智能化的重要手段。應(yīng)用領(lǐng)域?qū)挿汗I(yè)機器人與自動化成套裝備是生產(chǎn)過程的關(guān)鍵設(shè)備,可用于制造、安裝、檢測、物流等生產(chǎn)環(huán)節(jié),并寬泛應(yīng)用于汽車整車及汽車零部件、工程機械、軌道交通、低壓電器、電力、IC裝備、jun工、yan草、金融、醫(yī)藥、冶金及印刷出版等眾多行業(yè),應(yīng)用領(lǐng)域非常寬泛。 3.技術(shù)綜合性強工業(yè)機器人與自動化成套技術(shù),集中并融合了多項學(xué)科,涉及多項技術(shù)領(lǐng)域,包括工業(yè)機器人控制技術(shù)、機器人動力學(xué)及仿真、機器人構(gòu)建有限元分析、激光加工技術(shù)、模塊化程序設(shè)計、智能測量、建模加工一體化、工廠自動化以及精細物流等先進制造技術(shù),技術(shù)綜合性強。
擺焊功能簡介使用FANCU機器人進行弧焊焊接時,也可以實現(xiàn)擺動焊接(簡稱擺焊)。FANUC機器人的擺焊有五種模式,分別為正弦型擺焊、正弦2型擺焊、圓型擺焊、8字型擺焊與L型擺焊。正弦型擺焊:機器人弧焊焊接中標(biāo)準(zhǔn)的擺焊模式,可以與電弧傳感器、多層焊接功能進行組合使用。正弦2型擺焊:機器人的焊接動作與正弦型擺焊相同,可以在高頻率(一般為5Hz以上)下進行擺焊動作,動作控制方式與正弦型擺焊不同。通常,與振子型擺焊組合使用。圓型擺焊:機器人一邊畫圓一邊前進的擺焊模式,主要在搭接接頭和具有較大的蓋帽的焊接中使用。8字型擺焊:機器人一邊畫8字一邊前進的擺焊模式,主要在厚板的焊接和表面/外裝精磨、提**度等工況中使用。L型擺焊:主要在角焊焊接和V坡口焊接中使用,為了與接頭相對應(yīng),需要事先設(shè)置擺焊坐標(biāo)系和仰角。發(fā)那科查看本體型號與電機型號。

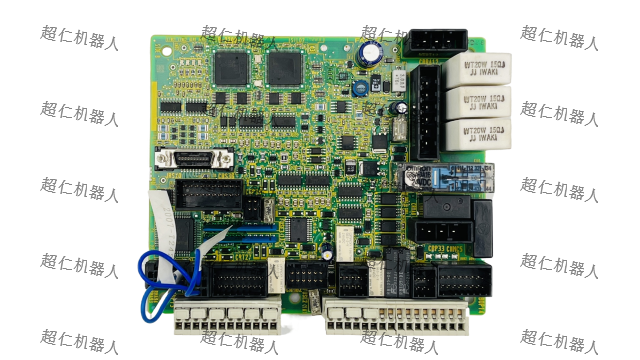
發(fā)那科機器人長時間停機故障分析維修 長時間停機容易產(chǎn)生的問題:主板電池掉電無法進系統(tǒng),本體電池掉電零位丟失。 主板電池掉電無法進系統(tǒng) (1)檢查方法 查看示教器上是否顯示SYST-035LoworNoBatteryPoweronMAIN報警,如有需測量主板電池的電壓,是否低于3V?無法進系統(tǒng)則觀察主板的7段碼是否顯示“1”? (2)恢復(fù)方法 SYST-035報警可在開機狀態(tài)下更換主板電池, 如無法進系統(tǒng)需初始化系統(tǒng)操作,并導(dǎo)入之前做的一般備份或者鏡像備份。若之前沒有備份,可嘗試導(dǎo)入FRA存儲區(qū)的備份(這個是內(nèi)存卡預(yù)留的一個斷電可保持的存儲區(qū),用于存放機器人的自動備份)。 二、本體電池掉電零位丟失 (1)檢查方法 查看示教器上是否顯示SRVO-065BLALalarm或SRVO-062BZALalarm報警,如有需測量本體電池的電壓,每節(jié)電池額定電壓是1.5V,四節(jié)電池的總電壓為6V (2)恢復(fù)方法 SRVO-065BLALalarm:開機更換本體底座處電池, SRVO-062BZALalarm:以上步驟更換電池后需參照說明書進行零點標(biāo)定FANUC發(fā)那科機器人021報警故障分析維修。云浮發(fā)那科機器人現(xiàn)場維修
工業(yè)機器人常用減速機—諧波減速機。欽州發(fā)那科機器人
電弧傳感器指令介紹:在FANUC機器人系統(tǒng)中內(nèi)置了*用指令來控制電弧傳感器的開啟與關(guān)閉,電弧傳感器指令包含跟蹤電弧傳感器指令與跟蹤結(jié)束指令,跟蹤電弧傳感器指令用于控制電弧傳感器的開啟跟蹤結(jié)束指令(TrackEnd)用于控制電弧傳感器的關(guān)閉,指令格式較為簡單,并且沒有指令參數(shù),可直接插入使用。兩條指令必須同時使用,單獨使用任何一條指令機器人都會出現(xiàn)報警。兩條指令在行業(yè)內(nèi)部也被稱為電弧跟蹤開始指令與電弧跟蹤結(jié)束指令。欽州發(fā)那科機器人
佛山超仁機器人科技有限公司是一家一般項目:智能機器人銷售;計算機軟硬件及輔助設(shè)備批發(fā);電子產(chǎn)品銷售;銷售代理;智能輸配電及控制設(shè)備銷售;機械設(shè)備銷售;人工智能硬件銷售;機械零件、零部件銷售;建筑裝飾材料銷售;建筑材料銷售;智能機器人的研發(fā);機械設(shè)備研發(fā);化工產(chǎn)品銷售(不含許可類化工產(chǎn)品);五金產(chǎn)品批發(fā);軟件開發(fā);信息技術(shù)咨詢服務(wù);信息咨詢服務(wù)(不含許可類信息咨詢服務(wù));人工智能行業(yè)應(yīng)用系統(tǒng)集成服務(wù);信息系統(tǒng)集成服務(wù);技術(shù)服務(wù)、技術(shù)開發(fā)、技術(shù)咨詢、技術(shù)交流、技術(shù)轉(zhuǎn)讓、技術(shù)推廣;科技中介服務(wù);機械設(shè)備租賃;通用設(shè)備修理;工業(yè)機器人安裝、維修;企業(yè)管理;潤滑油銷售。(除依法須經(jīng)批準(zhǔn)的項目外,憑營業(yè)執(zhí)照依法自主開展經(jīng)營活動)許可項目:各類工程建設(shè)活動;電氣安裝服務(wù)。(依法須經(jīng)批準(zhǔn)的項目,經(jīng)相關(guān)部門批準(zhǔn)后方可開展經(jīng)營活動,具體經(jīng)營項目以相關(guān)部門批準(zhǔn)文件或許可證件為準(zhǔn))的公司,致力于發(fā)展為創(chuàng)新務(wù)實、誠實可信的企業(yè)。佛山超仁機器人深耕行業(yè)多年,始終以客戶的需求為向?qū)В瑸榭蛻籼峁└哔|(zhì)量的工業(yè)機器人維修保養(yǎng)服務(wù),工業(yè)機器人整機,工業(yè)機器人備件,工業(yè)機器人現(xiàn)場。佛山超仁機器人不斷開拓創(chuàng)新,追求出色,以技術(shù)為先導(dǎo),以產(chǎn)品為平臺,以應(yīng)用為重點,以服務(wù)為保證,不斷為客戶創(chuàng)造更高價值,提供更優(yōu)服務(wù)。佛山超仁機器人始終關(guān)注機械及行業(yè)設(shè)備行業(yè)。滿足市場需求,提高產(chǎn)品價值,是我們前行的力量。
- 汕尾二手發(fā)那科機器人控制器 2025-02-24
- 廣東搬運發(fā)那科機器人驅(qū)動 2025-02-24
- 云浮六軸庫卡機器人電機 2025-02-24
- 深圳碼垛發(fā)那科機器人順德 2025-02-24
- 肇慶六關(guān)節(jié)發(fā)那科機器人熱線 2025-02-24
- 潮州焊接發(fā)那科機器人本體 2025-02-24
- 陽江焊接發(fā)那科機器人恢復(fù)零點 2025-02-24
- 揭陽碼垛發(fā)那科機器人聯(lián)系電話 2025-02-24
- 惠州供應(yīng)發(fā)那科機器人電源 2025-02-23
- 中山六軸發(fā)那科機器人保養(yǎng) 2025-02-23
- 新疆可移動活性炭投加機器 2025-02-24
- 汕尾二手發(fā)那科機器人控制器 2025-02-24
- 杭州管網(wǎng)疊壓無負壓供水設(shè)備維保 2025-02-24
- 青島步入式老化房批發(fā) 2025-02-24
- 富陽區(qū)碳氫真空清洗機批發(fā) 2025-02-24
- 天津固定氣缸生產(chǎn)廠家 2025-02-24
- 南昌直流變頻風(fēng)機供應(yīng) 2025-02-24
- 江蘇五軸CNC加工電話 2025-02-24
- 河北直接驅(qū)動滾筒篩品牌 2025-02-24
- 四川哪里有砂磨機哪家好 2025-02-24