SAR-ML50A編碼器調試安裝
機器人無處不在的社會支持制造業的工業機器人伴隨工業制造升級,必將進一步發展。迄今為止,從安全方面來看作為機器人類型之一是在裝配工作和運輸過程中,與人類在同一空間中協同工作的“協作機器人”。,人類和機器人一直在完全隔離的環境中工作,但作為解決未來勞動力短缺和多品種小批量生產等生產問題的手段,協作機器人可以滿足這樣的需求,幫助人類在人機共存的應用場景中發揮作用。因此,協作機器人正在逐步引起人們的關注,并在更多的領域被投入適用。電池壽命可計算。·編碼器內部始終在比較來自兩個不同傳感器的數據。SAR-ML50A編碼器調試安裝
,將其中線路一定義為A,另線路二定義為B。通常情況下,發送驅動器A、B之間的正電平在+2~+6V,是一個邏輯狀態,負電平在-2~-6V,是另一個邏輯狀態。尼康編碼器使用半雙工串行通信(RS-485標準),RS-485與RS-232、RS-422都是串行數據接口標準,蕞初都是由電子工業協會(EIA)制訂并發布的。RS-485可以采用二線制實現真正的多點雙向通信。尼康編碼器的串行通信速率從2.5Mbps至16Mbps,以滿足高速、高精度的應用需求。RS-485數據信號采用差分傳輸方式,也稱作平衡傳輸,它使用一對雙絞線整體式編碼器代理通常,絕對式編碼器的碼道越多,分辨率就越高,對于一個具有 N位二進制分辨率的編碼器,碼盤必須有N條碼道。

什么叫光電編碼器光電編碼器是通過讀取光電編碼盤上的圖案或編碼信息來表示與光電編碼器相連的電機轉子的位置信息的。根據光電編碼器的工作原理可以將光電編碼器分為式光電編碼器與增量式光電編碼器,下面簡單介紹下下式光電編碼器的的結構與工作原理做介紹。式光電編碼器的結構與工作原理式光電編碼器如圖所示,他是通過讀取編碼盤上的二進制的編碼信息來表示位置信息的。信號發生的時間,結合送引錠過程與光電信號的關系,利用PLC應用程序中的相關數據,編制符合要求的
光電檢測裝置的發射和接收裝置都安裝在生產現場,在使用中暴露出許多缺陷,其有內在因素也有外在因素,主要表現在以下幾個方面:1.發射裝置或接受裝置因機械震動等原因而引起的移位或偏移,導致接收裝置不能可靠的接收到光信號,而不能產生電信號。例如;光電編碼器應用在軋鋼調速系統中,因光電編碼器是直接用螺栓固定在電動機的外殼上,光電編碼器的軸通過較硬的彈簧片和電動機轉軸相連接,因電動機所帶負載是沖擊性負載,當軋機過鋼時會引起電動機轉軸和外殼的振動通過磁石元器件檢出多圈數斷電時電池的消費電流極小即使在馬達軸運轉的情況下,電池的消費流量也保持一定。

1992年,尼康發明了“M-sequence1-trackpattern”,以滿足市場對實現小型化和高可靠性的絕對值編碼器的需求。與由多個碼道(層)的模式組成的一般“格雷碼模式”不同,M序列以一個碼道模式生成絕對值數據,并且有格雷碼模式所無法實現的緊湊和高可靠性。尼康的編碼器:尼康的編碼器業務歷史悠久。從1960年代后半期開始從事編碼器的開發,1969年推出“RIE型光電旋轉編碼器”。自1990年以來一直致力于絕對值編碼器的開發。編碼器有兩種:一種是對從原點的移動量不斷積分得到位移量的增量法,另一種是通電同時計算絕對位置的絕對法。絕對值編碼器在設備斷電后再次上電時,能夠檢測出當前位置。以滿足不同類型的客戶需求。尼康編碼器種類及型號
工業用途的各種模塊。尼康將繼“MAR-MX60A-MF”和“MAR-MX60A”之后繼續擴大產品陣容,以滿足用戶需求。SAR-ML50A編碼器調試安裝
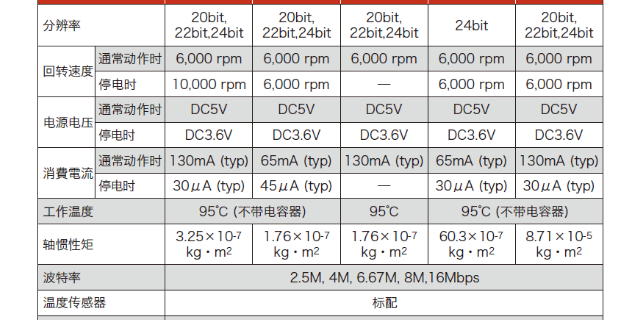
分體磁氣式多圈絕對值編碼器:M50A分辨率(可選):20bit、22bit、24bit溫度傳感器:標配。可同時獲取編碼器位置數據和溫度數據。高溫對應:工作溫度上限可達95℃(雙重電氣電壓搭載除外)。·通過磁石元器件檢出多圈數。·斷電時電池的消費電流極小。即使在馬達軸運轉的情況下,電池的消費流量也保持一定。·電池壽命可計算。·編碼器內部始終在比較來自兩個不同傳感器的數據。從而,當編碼器檢出某處潛在故障時,會以錯誤表示的形式反饋給上位控制器,對裝置或馬達的失控起到防患于未然的作用。·磁氣式多圈適用于小型AC伺服電機,小型機械臂,機器人使用的電機。SAR-ML50A編碼器調試安裝
- 北京MAR-MX50A編碼器應用領域 2024-12-17
- 山東Nikon編碼器調試安裝 2024-12-17
- 北京MC52編碼器費用是多少 2024-12-17
- 河北Nikon編碼器一級代理 2024-12-17
- MAR-M50A編碼器應用領域 2024-12-17
- 廣西尼康編碼器費用是多少 2024-12-17
- 湖北整體式編碼器應用領域 2024-12-17
- 浙江SAR-ML50A編碼器代理 2024-12-17
- 山東MC43編碼器調試安裝 2024-12-17
- 江蘇SAR-ML50A編碼器哪家質量好 2024-12-17
- 上海非開挖修復材料銷售價格 2025-02-07
- 東莞高精度點膠機廠家 2025-02-07
- 東莞漆包線繞線機哪家強 2025-02-07
- 安慶多槽式磁力清洗機廠家 2025-02-07
- 碳鋼氣動蝶閥費用 2025-02-07
- 上海殺菌劑球磨機 2025-02-07
- 賓館洗滌房 2025-02-07
- 昆明羅茨泵真空機組生產廠家 2025-02-07
- 浙江芯片涂膠顯影機 2025-02-07
- 虹口區特馬弗萊克斯全自動數控彎管機多少錢一臺 2025-02-07