舟山搬運機械手生產
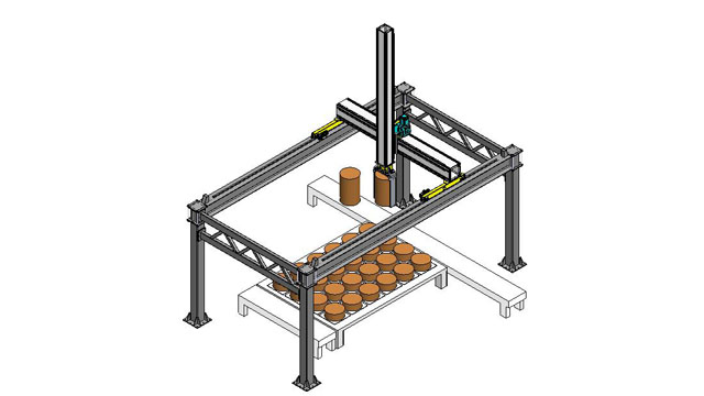
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點: 1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。三坐標搬運機械手,PLC控制。南京高銳特起重機械有限公司生產。舟山搬運機械手生產
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等; 7.誤操作保護裝置。無錫電動搬運機械手智能三坐標搬運機械手,南京。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長; 3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。智能三坐標搬運機械手,南京高銳特有限公司。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、 X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三坐標搬運機械手,PLC控制。虹口區搬運機械手生產
智能三坐標搬運機械手哪家生產,南京高銳特。舟山搬運機械手生產
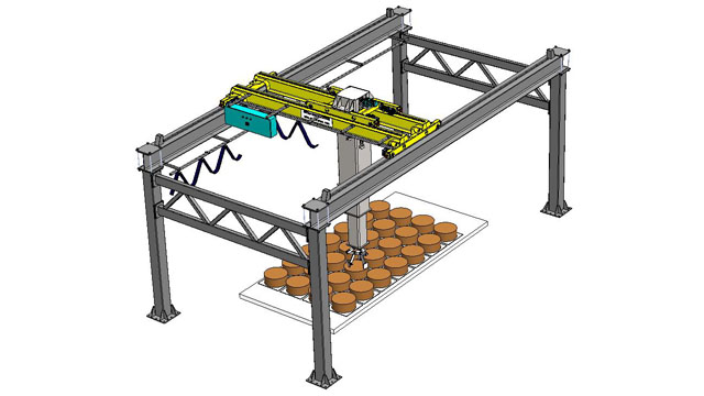
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、 導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。舟山搬運機械手生產
- 上海品質空中穿梭車 2025-03-22
- 南通品質空中穿梭車 2025-03-22
- 黑龍江空中穿梭車怎么選 2025-03-22
- 滄州空中穿梭車定制 2025-03-22
- 空中穿梭車廠家 2025-03-22
- 開封空中穿梭車行情 2025-03-22
- 連云港空中穿梭車廠家 2025-03-22
- 鶴壁空中穿梭車怎么選 2025-03-22
- 通化電動空中穿梭車 2025-03-21
- 鹽城手動空中穿梭車 2025-03-21
- 廣東徑向跳動可調刀柄品牌 2025-03-25
- 內蒙古微機PT保護測控裝置 2025-03-25
- 福建強勁風移動空調生產廠家 2025-03-25
- 海南材質可選冷卻器專業設計 2025-03-25
- 高速錐齒輪升降機公司 2025-03-25
- 飛翔ih離心泵 2025-03-25
- 成都大型奧貝球鐵定做 2025-03-25
- 馬鞍山鐵路軸承套圈鍛造自動化廠家 2025-03-25
- 淮安雙液真空灌膠機定制 2025-03-25
- 廣東高速臥式加工中心廠家直銷 2025-03-25