-
 天津安裝明火煤監測系統價格合理
天津安裝明火煤監測系統價格合理明火煤監測系統廣泛應用為了始終保持監測系統的先進性和有效性,系統具備自動升級功能。系統內置了版本檢測模塊,定期連接到軟件供應商的服務器,檢測是否有新的監測算法、功能模塊或安全補丁發布。當有更新可用時,系統會自動下載更新文件,并在不影響正常監測工作的前提下,采用...
2025-05-26 -
山西銷售明火煤監測系統怎么樣
實時預警與精細防控通過紅外測溫/熱成像技術,系統可實時監測煤炭溫度(精度±1℃),在溫度達到70℃(預警閾值)時立即觸發報警,較傳統人工巡檢效率提升90%以上。 多級聯動滅火機制系統可自動聯動噴淋裝置(響應時間≤5秒)或消防系統,實現"監測...
2025-05-26 -
 北京自動化光伏清潔機器人有哪些
北京自動化光伏清潔機器人有哪些深入探究其清潔原理,光伏清潔機器人展現出精妙之處。特制的毛刷選用防靜電且質地柔軟的纖維材質,既能吸附灰塵防止二次揚塵,又不會劃傷光伏板表面的鍍膜。配合精細的噴淋系統,噴出的水霧呈微米級均勻分布,迅速濕潤灰塵,降低其附著力。而且,機器人能根據灰塵厚度自動控制噴水...
2025-05-26 -
 云南新能源明火煤監測系統市場價格
云南新能源明火煤監測系統市場價格在煤炭開采、運輸與儲存等環節,明火煤帶來的安全隱患時刻威脅著煤炭行業的正常運轉。一旦因明火煤引發火災,不僅會造成煤炭資源的巨大損失,還可能致使礦井坍塌、運輸車輛損毀,更嚴重的是危及作業人員的生命安全。南京潤貝明火煤監測系統應運而生,時刻保持警惕的安全衛士,運用...
2025-05-23 -
 陜西整套明火煤監測系統廠家電話
陜西整套明火煤監測系統廠家電話監測系統具備良好的兼容性,采用標準的數據接口協議,如 OPC UA、Modbus TCP 等,可與火電廠的安全管理系統、環保監測系統等實現無縫對接。通過數據共享,安全管理系統能夠及時獲取明火煤監測信息,將其納入整體的安全管理體系中。例如,在制定安全培訓內容時,...
2025-05-23 -
 山西銷售明火煤監測系統廠家直銷
山西銷售明火煤監測系統廠家直銷數據可視化展示為了讓工作人員更直觀地了解監測數據,系統將采集到的數據以圖表、圖形等直觀形式呈現。例如,通過折線圖展示煤炭溫度隨時間的變化趨勢,橫坐標精確到分鐘,縱坐標溫度刻度精確到 0.5℃,能夠清晰地看到溫度的波動情況;用柱狀圖對比不同區域的煙霧濃度,不同顏...
2025-05-19 -
福建多功能明火煤監測系統哪家便宜
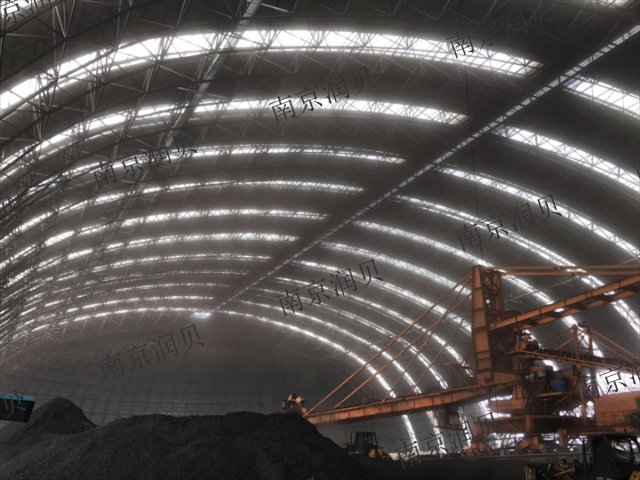
火電廠的棧橋是煤炭運輸的重要通道,其空間相對狹窄,通風條件有限。一旦發生火災,火勢會迅速蔓延。監測系統通過在棧橋上安裝攝像頭和傳感器,對煤炭運輸通道進行 24 小時不間斷監控。一旦發現煤炭因摩擦起火等明火隱患,便會前提時間發出警報,并聯動相關設備采取滅火、...
2025-05-19 -
廣西智能明火煤監測系統什么價格
在火力發電行業,煤炭資源的穩定供應與合理利用,對電廠的持續運營起著決定性作用。通過對明火煤的有效監測和預防,火電廠減少了因煤炭自燃等原因造成的煤炭資源浪費。某電廠在安裝系統前,每年因煤炭自燃損失煤炭和安裝后,損失量大幅降低,節約了大量煤炭資源,降低了燃料成...
2025-05-15 -
 河南國產明火煤監測系統什么價格
河南國產明火煤監測系統什么價格在火力發電領域,煤炭作為主要燃料,其安全性直接關乎電廠的穩定運行。明火煤監測系統在火電廠的應用,為煤炭安全管理帶來變革,通過實際案例展現出不可忽視的價值。在煤炭開采、運輸與儲存等環節,明火煤所帶來的安全隱患猶如高懸的達摩克利斯之劍,時刻威脅著煤炭行業的平穩運營...
2025-05-13 -
甘肅明火煤監測系統共同合作
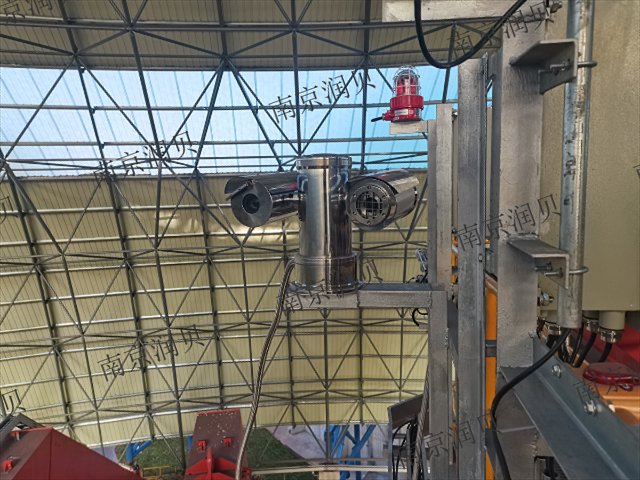
在煤礦開采環節,南京潤貝電力科技的明火煤監測系統發揮著至關重要的作用。井下作業環境復雜,采煤工作面、巷道等區域隨時可能因機械摩擦、電氣故障等引發明火煤隱患。該系統通過在關鍵位置部署高精度傳感器,能夠實時捕捉溫度異常及可燃氣體濃度變化,一旦檢測到危險信號,立即發...
2025-05-13 -
 山西自動化明火煤監測系統什么價格
山西自動化明火煤監測系統什么價格火電廠的備用煤場儲存著備用煤炭,以備不時之需。為確保備用煤炭存儲安全,監測軟件在備用煤場設置監測設備,實時監控煤炭的溫度、濕度等參數,預防明火煤出現,保證備用煤炭在需要時能夠正常投入使用。輸煤廊道是連接各個輸煤環節的重要通道,其空間狹長、通風條件復雜。煤炭在其...
2025-05-13 -
湖北明火煤監測系統代理商
在火力發電領域,煤炭作為主要燃料,其安全性直接關乎電廠的穩定運行。明火煤監測系統在火電廠的應用,為煤炭安全管理帶來變革,通過實際案例展現出不可忽視的價值。在煤炭開采、運輸與儲存等環節,明火煤所帶來的安全隱患猶如高懸的達摩克利斯之劍,時刻威脅著煤炭行業的平穩運營...
2025-05-13 -
 遼寧環保明火煤監測系統廠家直銷
遼寧環保明火煤監測系統廠家直銷為了始終保持監測系統的先進性和有效性,系統具備自動升級功能。系統內置了版本檢測模塊,定期連接到軟件供應商的服務器,檢測是否有新的監測算法、功能模塊或安全補丁發布。當有更新可用時,系統會自動下載更新文件,并在不影響正常監測工作的前提下,采用智能的分段升級和熱切換...
2025-05-13 -
黑龍江銷售明火煤監測系統批發商
現有的明火煤監測系統還有待提高準確性和可靠性,為了進一步提高監測的準確性和可靠性,南京潤貝明火煤監測系統采用了先進的多傳感器融合技術。系統將熱成像傳感器、氣體傳感器、煙霧傳感器、振動傳感器等多種不同類型的傳感器有機結合在一起,它們各自發揮獨特的優勢,相...
2025-05-13 -
內蒙古安裝明火煤監測系統設備廠家
火電廠的棧橋是煤炭運輸的重要通道,其空間相對狹窄,通風條件有限。一旦發生火災,火勢會迅速蔓延。監測系統通過在棧橋上安裝攝像頭和傳感器,對煤炭運輸通道進行 24 小時不間斷監控。一旦發現煤炭因摩擦起火等明火隱患,便會前提時間發出警報,并聯動相關設備采取滅火、...
2025-05-13 -
 貴州安裝明火煤監測系統代理商
貴州安裝明火煤監測系統代理商明火煤監測系統的帶來的收益,在煤炭開采、運輸與儲存等環節,明火煤所帶來的安全隱患時刻威脅著煤炭行業的平穩運營。煤炭在這些環節中,由于機械摩擦、電氣故障、通風不暢等多種因素,極易產生明火煤現象。一旦明火煤引發火災,其后果不堪設想,不僅會造成煤炭資源的大量浪費,還...
2025-05-13 -
 甘肅供應明火煤監測系統有哪些
甘肅供應明火煤監測系統有哪些明火煤監測系統的帶來的收益,在煤炭開采、運輸與儲存等環節,明火煤所帶來的安全隱患時刻威脅著煤炭行業的平穩運營。煤炭在這些環節中,由于機械摩擦、電氣故障、通風不暢等多種因素,極易產生明火煤現象。一旦明火煤引發火災,其后果不堪設想,不僅會造成煤炭資源的大量浪費,還...
2025-05-12 -
 山東安裝明火煤監測系統批發廠家
山東安裝明火煤監測系統批發廠家明火煤監測系統的帶來的收益,在煤炭開采、運輸與儲存等環節,明火煤所帶來的安全隱患時刻威脅著煤炭行業的平穩運營。煤炭在這些環節中,由于機械摩擦、電氣故障、通風不暢等多種因素,極易產生明火煤現象。一旦明火煤引發火災,其后果不堪設想,不僅會造成煤炭資源的大量浪費,還...
2025-05-12 -
江西集成明火煤監測系統生產廠家
在火力發電行業,煤炭資源的穩定供應與合理利用,對電廠的持續運營起著決定性作用。明火煤監測系統的問世,為火電廠解決煤炭自燃及明火煤引發的系列問題,提供了有效的技術手段。通過對明火煤的有效監測和科學預防,火電廠在減少煤炭資源浪費方面取得了成果。某電廠為例,在未...
2025-05-12 -
青海工業明火煤監測系統設備廠家
數據可視化展示為了讓工作人員更直觀地了解監測數據,系統將采集到的數據以圖表、圖形等直觀形式呈現。例如,通過折線圖展示煤炭溫度隨時間的變化趨勢,橫坐標精確到分鐘,縱坐標溫度刻度精確到 0.5℃,能夠清晰地看到溫度的波動情況;用柱狀圖對比不同區域的煙霧濃度,不同顏...
2025-05-12 -
 江西新能源明火煤監測系統誠信合作
江西新能源明火煤監測系統誠信合作根據危險程度的不同,監測系統對預警信息進行了分級管理。將預警級別劃分為一般、重要、緊急等多個等級。當出現一般預警時,可能只是某個參數出現輕微異常,如煤炭溫度超出正常范圍 1 - 2℃,系統會在界面上以黃色提示框的形式提示工作人員關注,并提供相關數據的歷史對比信...
2025-05-12 -
 福建環保光伏清潔機器人哪家好
福建環保光伏清潔機器人哪家好電站帶來穩定與高效 光伏電站 “卷王” 來了!南京潤貝清潔機器人橫掃積灰家人們!光伏電站還在靠人工擦面板? ?♂? 這效率在南京潤貝科技的清潔機器人面前直接被 “替代”! ? 卷效率:人工一天吭哧吭哧擦 600 平,...
2025-05-12 -
 河南購買光伏清潔機器人生產廠家
河南購買光伏清潔機器人生產廠家智能光伏自動清掃機器人 南京潤貝科技針對不同場景,對光伏清掃機器人進行了針對性研發與優化。在西北,其研發的智能光伏自動清掃機器人,充分考量當地氣候特性,應用了耐高溫、耐低溫的自主供電系統,該系統不外接電源、不拖拽線纜,依靠自身高效蓄電與能量...
2025-05-12 -
 北京自動化光伏清潔機器人哪里買
北京自動化光伏清潔機器人哪里買深入探究其清潔原理,光伏清潔機器人展現出精妙之處。特制的毛刷選用防靜電且質地柔軟的纖維材質,既能吸附灰塵防止二次揚塵,又不會劃傷光伏板表面的鍍膜。配合精細的噴淋系統,噴出的水霧呈微米級均勻分布,迅速濕潤灰塵,降低其附著力。而且,機器人能根據灰塵厚度自動控制噴水...
2025-05-12 -
重慶國內明火煤監測系統哪家強
明火煤監測系統軟件性能卓著。在準確性上,它融合先進的圖像識別與熱紅外感應技術。圖像識別模塊能對煤礦場景高分辨率成像,清晰捕捉幾平方厘米的微小火星;熱紅外感應可精確區分明火煤與周圍環境細微溫差,精度達 ±0.1℃。無論光線昏暗、煤塵飛揚的復雜區域,都能精細識別明...
2025-05-12 -
安徽集成明火煤監測系統廠家報價
明火煤監測系統廣泛應用為了始終保持監測系統的先進性和有效性,系統具備自動升級功能。系統內置了版本檢測模塊,定期連接到軟件供應商的服務器,檢測是否有新的監測算法、功能模塊或安全補丁發布。當有更新可用時,系統會自動下載更新文件,并在不影響正常監測工作的前提下,采用...
2025-05-12 -
寧夏安裝明火煤監測系統廠家批發價
在火力發電行業,煤炭資源的穩定供應與合理利用,對電廠的持續運營起著決定性作用。明火煤監測系統的問世,為火電廠解決煤炭自燃及明火煤引發的系列問題,提供了有效的技術手段。通過對明火煤的有效監測和科學預防,火電廠在減少煤炭資源浪費方面取得了成果。某電廠為例,在未...
2025-05-11 -
天津多功能明火煤監測系統價格合理
數據可視化展示為了讓工作人員更直觀地了解監測數據,系統將采集到的數據以圖表、圖形等直觀形式呈現。例如,通過折線圖展示煤炭溫度隨時間的變化趨勢,橫坐標精確到分鐘,縱坐標溫度刻度精確到 0.5℃,能夠清晰地看到溫度的波動情況;用柱狀圖對比不同區域的煙霧濃度,不同顏...
2025-05-11 -
 陜西新能源明火煤監測系統廠家電話
陜西新能源明火煤監測系統廠家電話電除塵設備在運行時,由于靜電作用,易積聚易燃物質。一旦遇到明火煤,電除塵區域就如同被點燃的桶,極易著火。明火煤監測系統在電除塵設備處專門設置了監測點,通過對周邊環境溫度、煙霧等參數的實時監測,及時發現潛在的明火煤隱患。在危險來臨前,提前采取措施消除隱患,全...
2025-05-11 -
內蒙古國產明火煤監測系統設備廠家
火電廠的監控室是整個電廠運行的指揮中樞。明火煤監測軟件將各個監測點的數據匯總于此,通過大屏幕直觀展示給工作人員。工作人員可以實時掌控明火煤監測動態,一旦發現異常,能夠迅速做出決策,指揮相關人員采取行動,保障火電廠的整體安全。 運輸煤炭的車輛卸載區是煤...
2025-05-11