-
 湖北桁架機器人供應(yīng)
湖北桁架機器人供應(yīng)桁架機器人能體現(xiàn)哪些功能與特點桁架機器人能代替人工進行作業(yè),主要是應(yīng)用于數(shù)控機床,CNC加工中心,桁架機器人改變了傳統(tǒng)的物流辦法,有效地改進了作業(yè)環(huán)境,供應(yīng)零件加工數(shù)字化、信息化、少人化直至無人化辦理,可靠地保證了產(chǎn)品質(zhì)量,極大地提高了勞作出產(chǎn)率,將工人從深重...
2024-05-13 -
 山東桁架機器人供應(yīng)廠
山東桁架機器人供應(yīng)廠桁架機器人的應(yīng)用介紹科技發(fā)展迅速,在某些環(huán)節(jié)逐步使用自動化、半自動化設(shè)備進行輔助操作,使工人從繁重的勞動中解放出來。其中由于具有操作簡便、安全、直觀等特點,能很好滿足現(xiàn)代企業(yè)越來越嚴苛的要求,而桁架機械手不斷發(fā)生如下變革在自動化程度越來越高的生產(chǎn)線上扮演著不可...
2024-05-10 -
 廣東定制機器人報價
廣東定制機器人報價上下料機器人維護保養(yǎng),先清潔后維修:對于臟污較重的電氣設(shè)備,先對其按鈕、接線點、接觸點進行清潔,檢查外部控制鍵是否失靈。許多故障都是由臟污及導(dǎo)電塵塊引起的,一經(jīng)清潔故障往往會排除。上下料機器人先靜態(tài)后動態(tài):在桁架機械手未通電時,判斷電氣設(shè)備按鈕、接觸器、熱繼電...
2024-05-07 -
 福建桁架機器人
福建桁架機器人桁架機械手又被稱為桁架機器人,是工業(yè)機器人中的一個類別,是以笛卡爾直角或斜角坐標系配置的線性運動為主,以多自由度回轉(zhuǎn)運動為輔,能夠自動控制,可重復(fù)編程的多用途操作機器設(shè)備。桁架機械手的分類1.按負載能力分類桁架機器人按負載能力大小可分為以下幾類:輕載桁架機械手...
2024-05-03 -
四川數(shù)控機器人廠家
上下料機器人的時候,只需要對原來的機床進行自動化改造,便可以實現(xiàn)制造過程的自動化,并且不需要采購新的機床或者去改變機床的實際結(jié)構(gòu),因此想要應(yīng)用上下料機器人是一件比較簡單的事情。上下料機器人能夠提高企業(yè)制造過程的自動化程度。有利于提高對工件或者各類物料的拾取、輸...
2024-04-30 -
 浙江上下料機械手哪家好
浙江上下料機械手哪家好桁架機械手使用前后的注意事項?在操作桁架機械手前要驗證好電機的轉(zhuǎn)方向是否一致,才能進行開啟電源;并且要檢查或確認好所有的工件都已加固,以免造成在操作過程中工件的滑落或配置松動;并且要檢查好電器控制箱內(nèi)的有無水或油進入以免造成線路運行不暢。操作過程中的注意事項在...
2024-04-27 -
 溫州桁架機械手行走
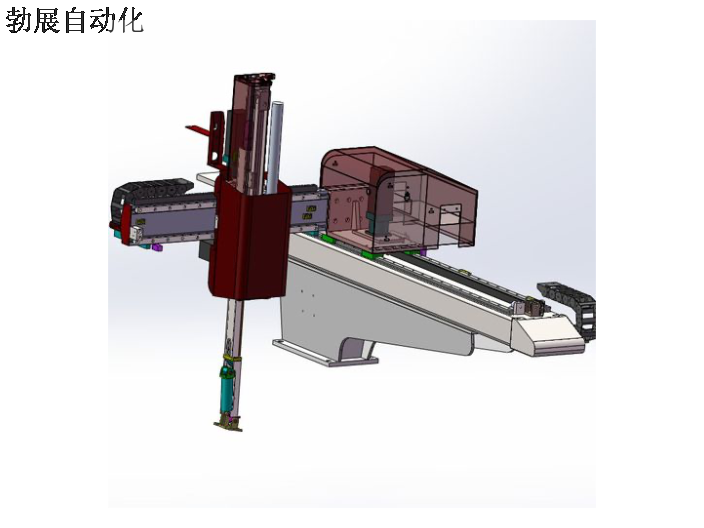
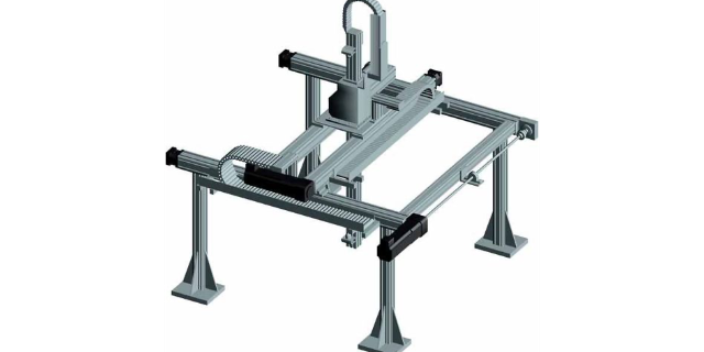
溫州桁架機械手行走桁架機械手由三個基本部分組成:主體、驅(qū)動系統(tǒng)和控制系統(tǒng)。機器人根據(jù)其結(jié)構(gòu)分為笛卡爾坐標系,機械手沿二維笛卡爾坐標系運動。主體部分通常采用龍門結(jié)構(gòu),由Y方向橫梁及導(dǎo)軌、Z方向閘板、十字滑座、立柱、過渡連接板、底座等組成。Z方向直線運動為交流伺服電機,通過蝸輪減速...
2024-04-24 -
 常州特殊桁架機械手
常州特殊桁架機械手桁架機器人,又稱桁架機械手,在工廠自動化中大部分應(yīng)用于自動上下料、自動堆垛等方面工作;滾輪導(dǎo)軌和齒輪齒條傳動系統(tǒng),在桁架機械手中普遍應(yīng)用。實現(xiàn)滾輪導(dǎo)軌和齒輪齒條傳動系統(tǒng)的自動潤滑,方便維修保養(yǎng)工作和延長使用壽命。那么,如何實現(xiàn)滾輪導(dǎo)軌和齒輪齒條傳動...
2024-04-21 -
 山東桁架機械手圖紙
山東桁架機械手圖紙助力機械手主機本體:助力機械手主機本體根據(jù)結(jié)構(gòu)形式分為軟索式和硬臂式 2 大類。軟索式助力機械手通常與滑動軌道配合使用,它的特點是服務(wù)范圍較大、與其他助力機械手相比,使用更輕便靈活,缺點是在助力機械手和工件之間有障礙物時不便于使用,以及對工人的操作熟練程度要求...
2024-04-18 -
江蘇數(shù)控機器人直銷
實際操作中,桁架機器人機器設(shè)備幾乎可以在工業(yè)制造中的各個領(lǐng)域被批量生產(chǎn)運用,操作方便快捷,工作效率高,產(chǎn)品工件性能高等優(yōu)點,與此同時將使用工人從繁重,單調(diào)的作業(yè)環(huán)境中解救出來,越來越備受生產(chǎn)廠家的青睞,擁有此套生產(chǎn)線設(shè)備勢必能突顯企業(yè)生產(chǎn)實力,單機自動化、整線...
2024-04-15 -
 浙江桁架機械手導(dǎo)軌
浙江桁架機械手導(dǎo)軌自動化桁架機械手設(shè)備是當前制造業(yè)、工業(yè)出產(chǎn)過程中的重要設(shè)備,也是主動化出產(chǎn)線上的重要組成之一。自動化桁架機械手設(shè)備呈現(xiàn)減輕了人工操作的風(fēng)險及人員安全問題。一起自動化桁架機械手設(shè)備具有平穩(wěn)、多功能、靈敏,因操作東西的不同功能也不同。自動化桁架機械手設(shè)備是一種常見...
2024-04-12 -
 江西六軸機器人定制
江西六軸機器人定制工業(yè)機器人的廣泛應(yīng)用讓越來越多的企業(yè)和工廠有了更好的發(fā)展,隨著人工的減少,很多的中小企業(yè)也開始選擇了工業(yè)機器人,但工業(yè)機器人的種類很多,怎么選擇適合生產(chǎn)的工業(yè)機器人呢,***我們就來簡單的說一下。應(yīng)用場合:要先考慮機器人是用于什么樣的場合以及需要什么樣的制程。...
2024-04-08 -
安徽自動化機器人定制
機器人可以提高整個生產(chǎn)過程的自動化程度機械手的使用,有助于實現(xiàn)材料的傳送、工件的裝卸、加工刀具的更換以及設(shè)備零件的裝配等的自動化程度,從而可以提高勞動生產(chǎn)效率和降低生產(chǎn)成本。改善工作環(huán)境、避免安全隱患在高溫、高壓、低溫、低壓、有灰塵、噪聲、臭味、放射性物質(zhì)或有...
2024-04-07 -
山東桁架機器人機器人
工業(yè)機器人工業(yè)機器人是一種能自動控制、可重復(fù)編程、多功能、多自由度的操作機,用于搬運材料、工件或操持工具,完成各種作業(yè)。它可以是固定式或移動式。工業(yè)機器人的控制功能和結(jié)構(gòu)特點以及自治能力各有差異,但必須具備三個基本要求:采用以CPU為的控制器進行控制,如工業(yè)控...
2024-04-06 -
四川工業(yè)機器人定制
桁架裝卸機械手主要由三部分組成:手部機構(gòu)運動機構(gòu)和控制系統(tǒng)。桁架機械手手是用來抓取工具的部件。根據(jù)所抓物體的形狀大小重量材質(zhì)和操作要求,有夾持式、握持式、吸附式等多種結(jié)構(gòu)形式。運動機構(gòu),它使手能夠完成各種旋轉(zhuǎn)(擺動)、運動或復(fù)合運動以達到規(guī)定的動作,改變所抓握...
2024-04-05 -
浙江關(guān)節(jié)機器人廠家
上下料機器人的時候,只需要對原來的機床進行自動化改造,便可以實現(xiàn)制造過程的自動化,并且不需要采購新的機床或者去改變機床的實際結(jié)構(gòu),因此想要應(yīng)用上下料機器人是一件比較簡單的事情。上下料機器人能夠提高企業(yè)制造過程的自動化程度。有利于提高對工件或者各類物料的拾取、輸...
2024-04-04 -
 寧波機械手供應(yīng)
寧波機械手供應(yīng)桁架機械手的設(shè)計要點?減少摩擦作為機械手的工作條件之一,桁架機械手也應(yīng)盡可能減少機械間隙帶來的運動誤差。因此,在設(shè)計桁架機械手時,機械手各關(guān)節(jié)的承載距離應(yīng)盡可能遠。它可以很小,每個關(guān)節(jié)都應(yīng)該有一個可靠且易于調(diào)整的軸承間隙調(diào)節(jié)機構(gòu)。桁架機械手的結(jié)構(gòu)尺寸應(yīng)滿足機械...
2024-04-03 -
 河南工業(yè)機器人報價
河南工業(yè)機器人報價桁架機械手的任務(wù)是協(xié)助或代替完成各種預(yù)期任務(wù),減少工業(yè)生產(chǎn)中的體力勞動工作量,可以代替人類從事危險的、重復(fù)性的工作。。在機械設(shè)備等工程機械的應(yīng)用中,桁架操縱在物料搬運、多夾持和作業(yè)設(shè)備方面尤為突出,可成倍提高生產(chǎn)效率,降低人工成本,是企業(yè)的主要開支。桁架機械手...
2024-04-02 -
 福建關(guān)節(jié)機器人定制
福建關(guān)節(jié)機器人定制桁架機器人能體現(xiàn)哪些功能與特點桁架機器人能代替人工進行作業(yè),主要是應(yīng)用于數(shù)控機床,CNC加工中心,桁架機器人改變了傳統(tǒng)的物流辦法,有效地改進了作業(yè)環(huán)境,供應(yīng)零件加工數(shù)字化、信息化、少人化直至無人化辦理,可靠地保證了產(chǎn)品質(zhì)量,極大地提高了勞作出產(chǎn)率,將工人從深重...
2024-04-01 -
 上海桁架機器人報價
上海桁架機器人報價桁架機械手又被稱為桁架機器人,是工業(yè)機器人中的一個類別,是以笛卡爾直角或斜角坐標系配置的線性運動為主,以多自由度回轉(zhuǎn)運動為輔,能夠自動控制,可重復(fù)編程的多用途操作機器設(shè)備。桁架機械手的分類1.按負載能力分類桁架機器人按負載能力大小可分為以下幾類:輕載桁架機械手...
2024-03-31 -
 江蘇關(guān)節(jié)機器人廠家
江蘇關(guān)節(jié)機器人廠家機器人可以提高整個生產(chǎn)過程的自動化程度機械手的使用,有助于實現(xiàn)材料的傳送、工件的裝卸、加工刀具的更換以及設(shè)備零件的裝配等的自動化程度,從而可以提高勞動生產(chǎn)效率和降低生產(chǎn)成本。改善工作環(huán)境、避免安全隱患在高溫、高壓、低溫、低壓、有灰塵、噪聲、臭味、放射性物質(zhì)或有...
2024-03-30 -
 浙江自動化機器人直銷
浙江自動化機器人直銷眾所周知桁架機器手在自動化生產(chǎn)中占有中流砥柱的地位,憑借著優(yōu)越的操作能力和穩(wěn)定的性能成為了現(xiàn)如今加工制造業(yè)之中不可或缺的設(shè)備之一,而在操作使用真實有效的桁架機械手時也需要對設(shè)備按如下內(nèi)容進行良好的維護,保證其穩(wěn)定性和耐用性才能夠呈現(xiàn)更高效的操作運轉(zhuǎn)。注意軸承和...
2024-03-29 -
貴州自動化機器人
工業(yè)機器人的廣泛應(yīng)用讓越來越多的企業(yè)和工廠有了更好的發(fā)展,隨著人工的減少,很多的中小企業(yè)也開始選擇了工業(yè)機器人,但工業(yè)機器人的種類很多,怎么選擇適合生產(chǎn)的工業(yè)機器人呢,***我們就來簡單的說一下。應(yīng)用場合:要先考慮機器人是用于什么樣的場合以及需要什么樣的制程。...
2024-03-28 -
浙江非標機器人機器人
通過視覺定位,機器人拾取一個產(chǎn)品后調(diào)整位置和角度再拾取下一個產(chǎn)品,三個產(chǎn)品同時放入垛位當中,每個機器人對應(yīng)2個垛位,當一個垛位碼滿后向另一個垛位碼垛,交替進行。工作環(huán)境:常溫定位原理:皮帶輸送、視覺定位、動態(tài)跟蹤拾取、定點放置定位精度:±鮮食品包裝生產(chǎn)線機器人...
2024-03-27 -
江西全自動機器人設(shè)備
機器人可以提高整個生產(chǎn)過程的自動化程度機械手的使用,有助于實現(xiàn)材料的傳送、工件的裝卸、加工刀具的更換以及設(shè)備零件的裝配等的自動化程度,從而可以提高勞動生產(chǎn)效率和降低生產(chǎn)成本。改善工作環(huán)境、避免安全隱患在高溫、高壓、低溫、低壓、有灰塵、噪聲、臭味、放射性物質(zhì)或有...
2024-03-26 -
機床機器人哪家好
上下料機械手,自動機械手,平衡吊及安裝懸,真空搬運真空吸,搬運機械手,真空吊具,真空吸吊機,定位夾具,工裝夾具,快速夾具,機床夾具,車床夾具,氣動夾具,機械手夾具,電控夾具,機器人治具夾具,自動化沖壓機器人,2)驅(qū)動器(Actuator)將電能或流體能轉(zhuǎn)換成機...
2024-03-25 -
 常州加工中心桁架機械手
常州加工中心桁架機械手桁架機械手結(jié)構(gòu)的剛性:桁架機械手設(shè)計中的結(jié)構(gòu)強度及剛性比較低會產(chǎn)生振動,從而造成定位精度較低;運動重量:包括機械手本身及抓取工件的重量,在桁架機械手的設(shè)計中一般會根據(jù)工件的重量來決定機械手剛性,當我拉抓取的工件重量越重時產(chǎn)生的慣量也就越大,所以在運動件重量增加...
2024-03-24 -
浦東新區(qū)數(shù)控機床桁架機械手
桁架機械手由三個基本部分組成:主體、驅(qū)動系統(tǒng)和控制系統(tǒng)。機器人根據(jù)其結(jié)構(gòu)分為笛卡爾坐標系,機械手沿二維笛卡爾坐標系運動。主體部分通常采用龍門結(jié)構(gòu),由Y方向橫梁及導(dǎo)軌、Z方向閘板、十字滑座、立柱、過渡連接板、底座等組成。Z方向直線運動為交流伺服電機,通過蝸輪減速...
2024-03-22 -
湖南桁架機械手齒條
桁架式機器人選用模塊化的制造,可以完結(jié)兩個以上工位產(chǎn)品的轉(zhuǎn)移完結(jié)工件從一個地方到另一個地方的全自動化轉(zhuǎn)移,準確度更高安裝也更加的方便。一起因其操作簡略可以完結(jié)當天培訓(xùn)當天就上崗操作。而且桁架式機器人的通用性很廣。實現(xiàn)無人化操作桁架式機器人不只適用于重型工業(yè)工件...
2024-03-21 -
臺州國外桁架機械手品牌
采用桁架機械手輸送的柔性加工自動線,可以提高數(shù)控企業(yè)的生產(chǎn)效率,推動由桁架式機械手輸送的柔性加工自動線開始向國際水準邁進。數(shù)控機床機械手桁架機械手主要實現(xiàn)機床制造過程的完全自動化,并采用了集成加工技術(shù),適用于生產(chǎn)線的上下料、工件翻轉(zhuǎn)、工件轉(zhuǎn)序等。桁架機械手...
2024-03-20