-
 奉賢區(qū)手動(dòng)桁架機(jī)械手
奉賢區(qū)手動(dòng)桁架機(jī)械手1.機(jī)械制造過程中涉及大量的物料搬運(yùn)工作,從原材料的搬運(yùn)到半成品和成品的流轉(zhuǎn)。桁架機(jī)械手可以根據(jù)不同的物料重量、形狀和尺寸,配備相應(yīng)的末端執(zhí)行器,實(shí)現(xiàn)對(duì)各種物料的高效搬運(yùn)。與傳統(tǒng)的人工搬運(yùn)或叉車搬運(yùn)相比,桁架機(jī)械手能夠在狹小的空間內(nèi)靈活作業(yè),并且搬運(yùn)速度快、定...
2025-02-21 -
 定制空中穿梭車報(bào)價(jià)
定制空中穿梭車報(bào)價(jià)在大型工業(yè)生產(chǎn)車間,往往有多臺(tái)空中穿梭車同時(shí)作業(yè)。為了實(shí)現(xiàn)它們之間的協(xié)同工作,需要一套完善的調(diào)度系統(tǒng)。該系統(tǒng)根據(jù)生產(chǎn)任務(wù)的優(yōu)先級(jí)和各個(gè)穿梭車的位置、狀態(tài),合理分配運(yùn)輸任務(wù)。通過無線通信技術(shù),實(shí)現(xiàn)穿梭車之間的信息交互,避免***和碰撞,提高整體的運(yùn)輸效率。空中穿...
2025-02-20 -
 石家莊空中穿梭車報(bào)價(jià)
石家莊空中穿梭車報(bào)價(jià)工業(yè)制造裝配自動(dòng)化是一個(gè)系統(tǒng)工程,空中穿梭車需要與其他自動(dòng)化設(shè)備協(xié)同作業(yè)。它可以與自動(dòng)化倉儲(chǔ)系統(tǒng)無縫對(duì)接,實(shí)現(xiàn)物料的自動(dòng)入庫和出庫。在生產(chǎn)線上,穿梭車又能與機(jī)器人、自動(dòng)化裝配設(shè)備等緊密配合,將物料準(zhǔn)確地遞送到各個(gè)裝配環(huán)節(jié)。這種協(xié)同作業(yè)模式極大地提高了生產(chǎn)的連貫...
2025-02-20 -
 朔州卷揚(yáng)機(jī)價(jià)格
朔州卷揚(yáng)機(jī)價(jià)格相比于傳統(tǒng)的人工物料搬運(yùn)方式,卷揚(yáng)機(jī)在自動(dòng)化裝配線中具有諸多優(yōu)勢(shì)。它能夠 24 小時(shí)不間斷工作,不受人員疲勞和工作時(shí)間的限制;搬運(yùn)速度快、效率高,能夠**縮短生產(chǎn)周期;同時(shí),還能減少人工搬運(yùn)過程中可能出現(xiàn)的物料損壞和安全事故。為了確保卷揚(yáng)機(jī)在運(yùn)行過程中的安全,...
2025-02-19 -
 連云港智能蝸輪蝸桿卷揚(yáng)機(jī)
連云港智能蝸輪蝸桿卷揚(yáng)機(jī)1. 雖然電梯的曳引系統(tǒng)主要采用鋼絲繩和曳引輪,但在一些特殊場(chǎng)合或小型電梯中,蝸輪蝸桿卷揚(yáng)機(jī)也有應(yīng)用。由于其具有良好的自鎖性能,在電梯停止運(yùn)行時(shí),能夠有效防止轎廂意外滑落。同時(shí),蝸輪蝸桿的大傳動(dòng)比可以使電機(jī)以較小的轉(zhuǎn)速運(yùn)行,降低能耗和噪音。然而,由于蝸輪蝸桿在...
2025-02-19 -
 出口蝸輪蝸桿卷揚(yáng)機(jī)
出口蝸輪蝸桿卷揚(yáng)機(jī)隨著科技的不斷進(jìn)步,蝸輪蝸桿卷揚(yáng)機(jī)也在不斷發(fā)展。未來,其將朝著更高的傳動(dòng)效率、更精細(xì)的控制、更小的體積和更高的可靠性方向發(fā)展。采用新型材料和制造工藝,提高蝸輪蝸桿的耐磨性和強(qiáng)度,進(jìn)一步優(yōu)化其性能。智能化是蝸輪蝸桿卷揚(yáng)機(jī)的重要發(fā)展方向之一。通過引入人工智能、物聯(lián)...
2025-02-19 -
淮安蝸輪蝸桿卷揚(yáng)機(jī)怎么選
蝸輪蝸桿卷揚(yáng)機(jī)主要由蝸輪、蝸桿、卷筒、機(jī)架等部件構(gòu)成。其中,蝸輪和蝸桿是**傳動(dòng)部件,它們獨(dú)特的齒形結(jié)構(gòu),決定了卷揚(yáng)機(jī)的傳動(dòng)特性。卷筒用于纏繞鋼絲繩,實(shí)現(xiàn)重物的升降動(dòng)作。機(jī)架則起到支撐和固定各個(gè)部件的作用,確保整個(gè)設(shè)備在運(yùn)行過程中的穩(wěn)定性。這種結(jié)構(gòu)設(shè)計(jì)緊湊,占...
2025-02-18 -
 南京生產(chǎn)空中穿梭車
南京生產(chǎn)空中穿梭車醫(yī)藥制造行業(yè)對(duì)生產(chǎn)的精細(xì)度和無菌環(huán)境要求極高。空中穿梭車可以在嚴(yán)格的無菌環(huán)境下運(yùn)行,將藥品原材料、中間體和成品準(zhǔn)確地運(yùn)輸?shù)礁鱾€(gè)生產(chǎn)環(huán)節(jié)。其精細(xì)的定位和控制功能,能夠確保藥品生產(chǎn)過程中的物料配比準(zhǔn)確無誤。同時(shí),通過自動(dòng)化的運(yùn)輸方式,減少了人員在無菌車間的走動(dòng),降...
2025-02-18 -
 秦皇島空中穿梭車
秦皇島空中穿梭車隨著工業(yè) 4.0 和智能制造的深入發(fā)展,空中穿梭車的未來發(fā)展前景廣闊。未來,空中穿梭車將更加智能化、自動(dòng)化,具備更強(qiáng)的自主決策能力和與其他智能設(shè)備的協(xié)同能力。同時(shí),其運(yùn)輸效率和精度將進(jìn)一步提高,能夠適應(yīng)更加復(fù)雜和多樣化的生產(chǎn)需求。此外,空中穿梭車還將朝著綠色環(huán)...
2025-02-18 -
 定制空中穿梭車生產(chǎn)商
定制空中穿梭車生產(chǎn)商空中穿梭車采用高度自動(dòng)化的操作模式,操作人員只需在控制中心設(shè)定好運(yùn)輸任務(wù)和路線,穿梭車就能自動(dòng)完成運(yùn)輸。這種自動(dòng)化模式不僅減少了人工成本,還降低了人為因素導(dǎo)致的錯(cuò)誤和事故風(fēng)險(xiǎn),保障了生產(chǎn)的安全和穩(wěn)定。精細(xì)的定位與停靠是空中穿梭車的**技術(shù)之一。通過先進(jìn)的傳感器...
2025-02-17 -
 張家口空中穿梭車行情
張家口空中穿梭車行情食品飲料行業(yè)的生產(chǎn)具有特殊性,對(duì)衛(wèi)生和生產(chǎn)環(huán)境要求嚴(yán)格。空中穿梭車可以在滿足衛(wèi)生標(biāo)準(zhǔn)的前提下,實(shí)現(xiàn)物料的高效運(yùn)輸。它可以將原材料、包裝材料等運(yùn)輸?shù)缴a(chǎn)車間,避免了地面運(yùn)輸可能帶來的污染。而且,在空中穿梭車的設(shè)計(jì)中,可以采用符合食品衛(wèi)生標(biāo)準(zhǔn)的材料和表面處理工藝,...
2025-02-17 -
 馬鞍山卷揚(yáng)機(jī)生產(chǎn)商
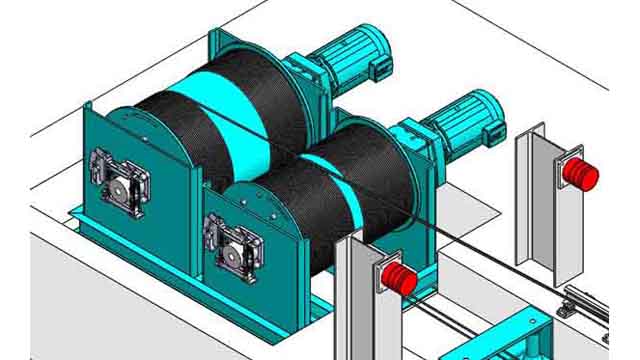
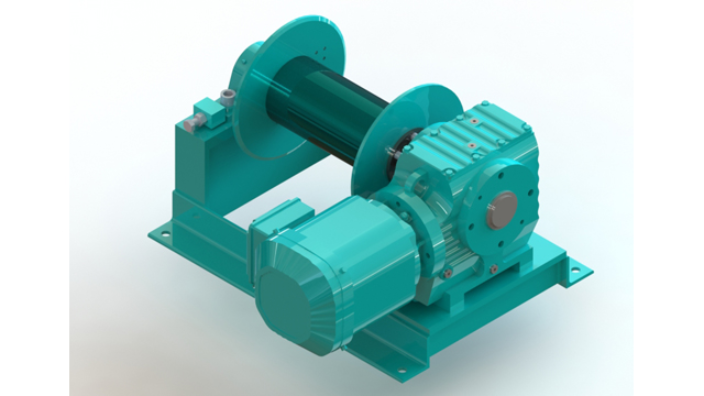
馬鞍山卷揚(yáng)機(jī)生產(chǎn)商卷揚(yáng)機(jī)主要由電動(dòng)機(jī)、減速機(jī)、卷筒、制動(dòng)器、機(jī)架以及鋼絲繩等部分組成。電動(dòng)機(jī)作為動(dòng)力源,提供初始的旋轉(zhuǎn)動(dòng)力。減速機(jī)則是關(guān)鍵部件,它通過齒輪傳動(dòng),將電動(dòng)機(jī)的高速低扭矩轉(zhuǎn)化為卷筒所需的低速高扭矩,保證卷揚(yáng)機(jī)能夠平穩(wěn)地提升和下放重物。卷筒用于纏繞鋼絲繩,其尺寸和強(qiáng)度根...
2025-02-15 -
 蕪湖空中自行小車廠家
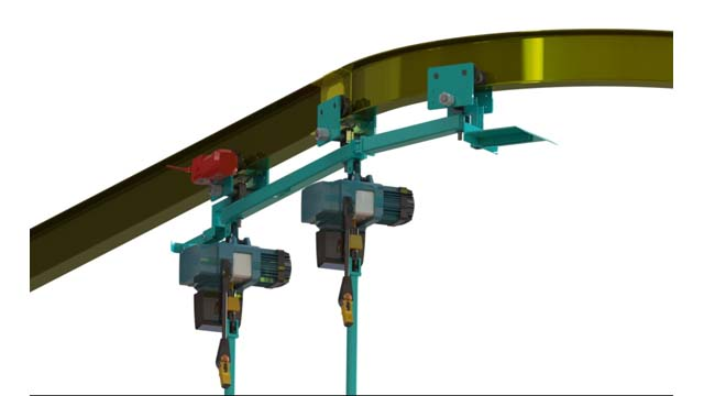
蕪湖空中自行小車廠家空中自行小車-智能小車鋼結(jié)構(gòu)架、工字鋼軌道、道岔、轉(zhuǎn)盤、升降機(jī)構(gòu)、自行小車系統(tǒng)、導(dǎo)電系統(tǒng)、控制系統(tǒng)等組成。產(chǎn)品特點(diǎn):具有起升、運(yùn)輸、積放儲(chǔ)存、自動(dòng)寄送、垂直升降與轉(zhuǎn)線、水平自動(dòng)合分流等功能;小車單獨(dú)驅(qū)動(dòng),可各自按不同速度行駛并根據(jù)需要變換速度;小車可自行爬坡;...
2025-02-13 -
 自制桁架機(jī)械手怎么選
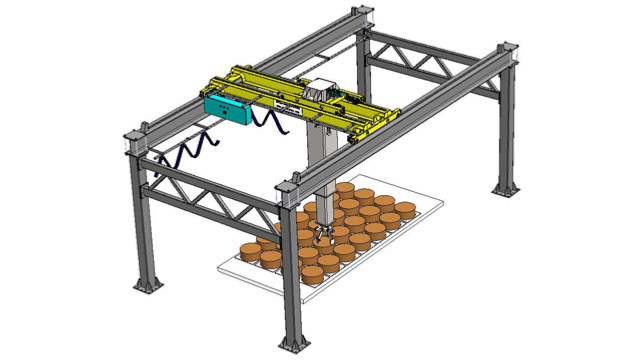
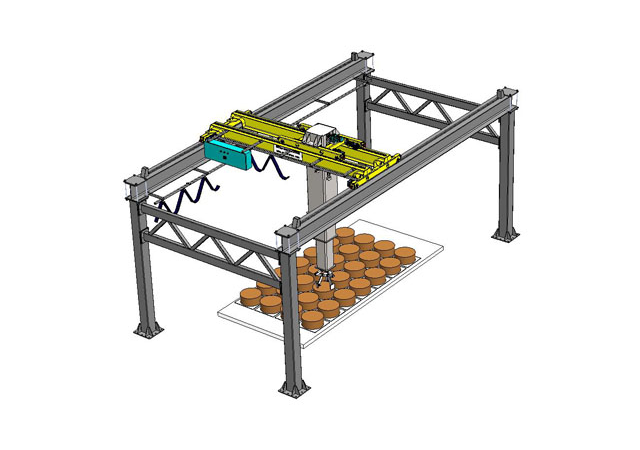
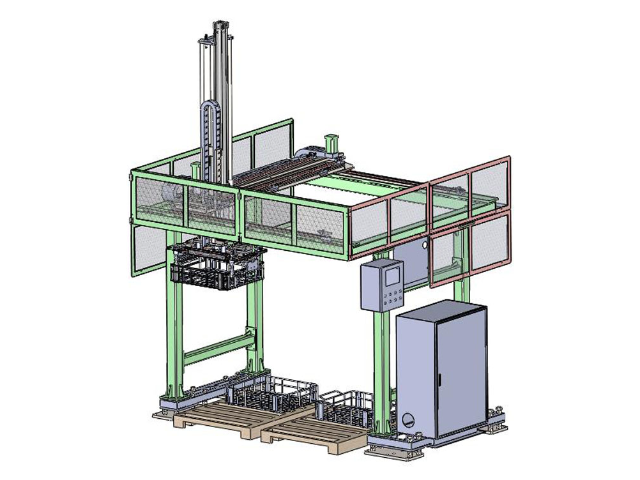
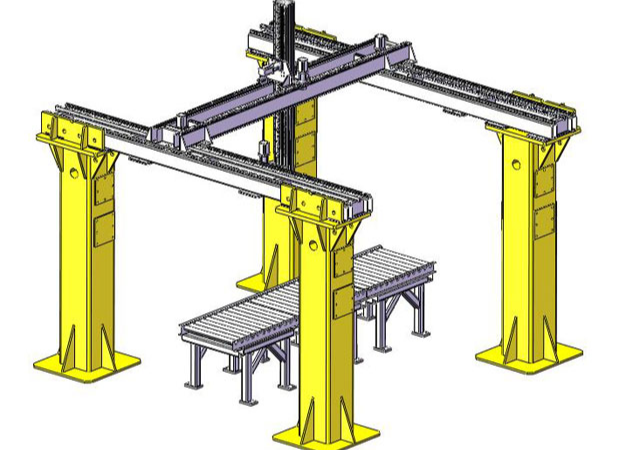
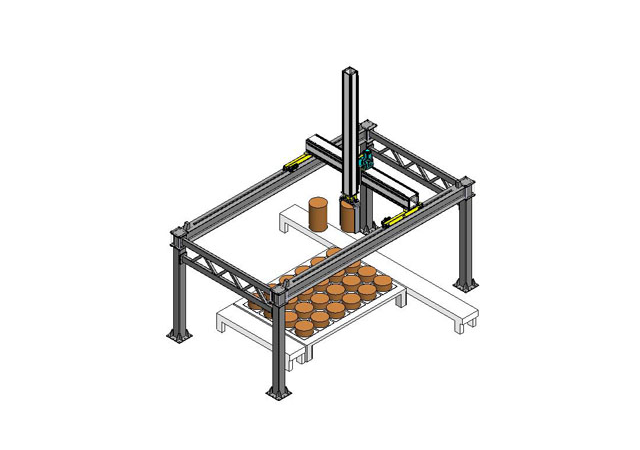
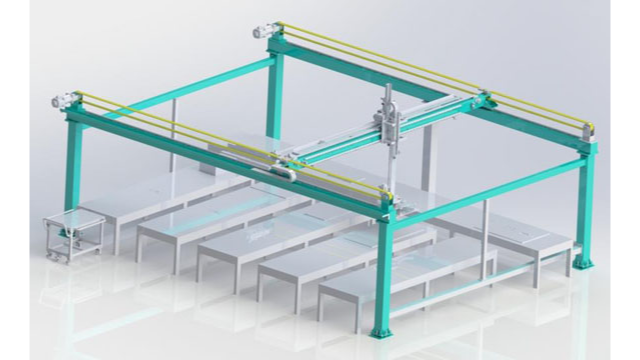
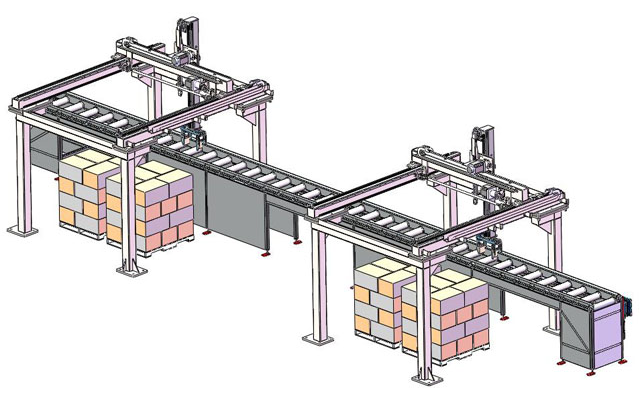
自制桁架機(jī)械手怎么選產(chǎn)品簡介:一、桁架機(jī)械手簡介:三坐標(biāo)搬運(yùn)機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點(diǎn):1.各軸方向以極高的速度直線運(yùn)行,可用伺服電機(jī)快速響應(yīng);2.連續(xù)工作時(shí)間長; 3.定位精度可達(dá)0.02mm;...
2025-01-11 -
 楊浦區(qū)桁架機(jī)械手價(jià)格
楊浦區(qū)桁架機(jī)械手價(jià)格一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運(yùn)行機(jī)構(gòu),采用齒輪細(xì)條傳動(dòng),傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器檢測(cè)...
2025-01-11 -
閔行區(qū)使用桁架機(jī)械手
一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成; X軸方向運(yùn)行機(jī)構(gòu),采用齒輪細(xì)條傳動(dòng),傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器檢...
2025-01-11 -
 云龍區(qū)自動(dòng)桁架機(jī)械手
云龍區(qū)自動(dòng)桁架機(jī)械手一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運(yùn)行機(jī)構(gòu),采用齒輪細(xì)條傳動(dòng),傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器檢測(cè)...
2025-01-11 -
 新沂智能桁架機(jī)械手
新沂智能桁架機(jī)械手一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運(yùn)行機(jī)構(gòu),采用齒輪細(xì)條傳動(dòng),傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器檢測(cè)...
2025-01-11 -
 制造桁架機(jī)械手
制造桁架機(jī)械手產(chǎn)品簡介:一、桁架機(jī)械手簡介:三坐標(biāo)搬運(yùn)機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點(diǎn):1.各軸方向以極高的速度直線運(yùn)行,可用伺服電機(jī)快速響應(yīng);2.連續(xù)工作時(shí)間長;3.定位精度可達(dá)0.02mm; ...
2025-01-11 -
普陀區(qū)桁架機(jī)械手生產(chǎn)商
一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、 Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運(yùn)行機(jī)構(gòu),采用齒輪細(xì)條傳動(dòng),傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器...
2025-01-11 -
 徐匯區(qū)國內(nèi)桁架機(jī)械手
徐匯區(qū)國內(nèi)桁架機(jī)械手產(chǎn)品簡介:一、桁架機(jī)械手簡介:三坐標(biāo)搬運(yùn)機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點(diǎn):1.各軸方向以極高的速度直線運(yùn)行,可用伺服電機(jī)快速響應(yīng);2.連續(xù)工作時(shí)間長;3.定位精度可達(dá)0.02mm;4...
2025-01-11 -
 梁溪區(qū)桁架機(jī)械手供應(yīng)商
梁溪區(qū)桁架機(jī)械手供應(yīng)商一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運(yùn)行機(jī)構(gòu), 采用齒輪細(xì)條傳動(dòng), 傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器...
2025-01-10 -
虹口區(qū)手動(dòng)桁架機(jī)械手
一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運(yùn)行機(jī)構(gòu),采用齒輪細(xì)條傳動(dòng),傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器檢測(cè)...
2025-01-10 -
什么桁架機(jī)械手定制
一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、 X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運(yùn)行機(jī)構(gòu),采用齒輪細(xì)條傳動(dòng),傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器...
2025-01-10 -
邳州電動(dòng)桁架機(jī)械手
產(chǎn)品簡介:一、桁架機(jī)械手簡介:三坐標(biāo)搬運(yùn)機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點(diǎn):1.各軸方向以極高的速度直線運(yùn)行,可用伺服電機(jī)快速響應(yīng);2.連續(xù)工作時(shí)間長; 3.定位精度可達(dá)0.02mm;...
2025-01-10 -
黃浦區(qū)自動(dòng)桁架機(jī)械手
一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運(yùn)行機(jī)構(gòu),采用齒輪細(xì)條傳動(dòng),傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器檢測(cè)...
2025-01-10 -
 嘉定區(qū)使用桁架機(jī)械手
嘉定區(qū)使用桁架機(jī)械手一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、 X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運(yùn)行機(jī)構(gòu),采用齒輪細(xì)條傳動(dòng),傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器檢...
2025-01-10 -
梁溪區(qū)品質(zhì)桁架機(jī)械手
產(chǎn)品簡介:一、桁架機(jī)械手簡介:三坐標(biāo)搬運(yùn)機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點(diǎn):1.各軸方向以極高的速度直線運(yùn)行,可用伺服電機(jī)快速響應(yīng);2.連續(xù)工作時(shí)間長;3.定位精度可達(dá)0.02mm;4...
2025-01-10 -
 浦東新區(qū)桁架機(jī)械手供應(yīng)商
浦東新區(qū)桁架機(jī)械手供應(yīng)商一、桁架機(jī)械手產(chǎn)品構(gòu)成:桁架機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、 Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運(yùn)行機(jī)構(gòu),采用齒輪細(xì)條傳動(dòng),傳感器檢測(cè)元件+機(jī)械限位;Z軸方向運(yùn)行機(jī)構(gòu),采用全封閉減速電機(jī)角型輪傳動(dòng)+齒輪齒條傳動(dòng),傳感器檢...
2025-01-10 -
 吉林桁架機(jī)械手廠家
吉林桁架機(jī)械手廠家產(chǎn)品簡介:一、桁架機(jī)械手簡介:三坐標(biāo)搬運(yùn)機(jī)械手由鋼結(jié)構(gòu)架、X軸運(yùn)行機(jī)構(gòu)、Y軸運(yùn)行機(jī)構(gòu)、Z軸升降機(jī)構(gòu)、抓取機(jī)械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點(diǎn):1.各軸方向以極高的速度直線運(yùn)行,可用伺服電機(jī)快速響應(yīng);2.連續(xù)工作時(shí)間長;3.定位精度可達(dá)0.02mm;4...
2025-01-09