-
 內蒙古國產化目標識別自主可控
內蒙古國產化目標識別自主可控“啟明935A”系列芯片已經成功點亮,并完成各項功能性測試,達到車規級量產標準。啟明935A是行業首顆基于Chiplet(芯粒/小芯片)異構集成范式的自動駕駛芯片,但并非單一芯片,而是一個家族系列。啟明935HUBChiplet可以和不同數量的大熊星座AICh...
2025-06-26 -
 吉林移動目標識別控制軟件
吉林移動目標識別控制軟件SpeedDP作為一個服務型AI平臺,它能提供從數據標注、模型訓練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發功能。平臺所需算法并不是固定的,使用者可以根據自身實際應用場景進行AI算法的定制化開發,例如平臺經過不斷的迭代,目前能夠支持YO...
2025-06-26 -
 江西智慧園區AI智能方案專家
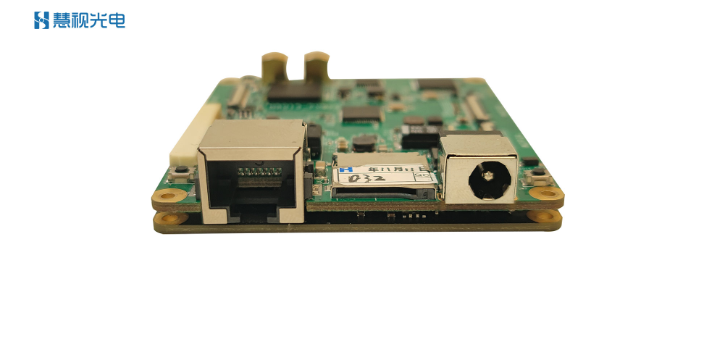
江西智慧園區AI智能方案專家成都慧視光電技術有限公司開發的RK3588系列圖像處理板Viztra-HE030圖像處理板能夠在算法的支持下,對高速公路上的車輛進行檢測識別,對個別車輛進行指定安全跟蹤和檢測,這將有助于有關部門進行測速和安全駕駛的管理偵查。通過實時數據的采集分析,還能夠找出高...
2025-06-26 -
 穩定目標跟蹤銷售廠家
穩定目標跟蹤銷售廠家由于侵入的目標的形狀和顏色等特征是難以固定的,再加上監控的場景,即背景往往比較復雜,只利用一個單幀圖像就找出移動的目標是非常困難的。然而,目標的運動導致了其運動時間內,監控場景圖像的連續變化,所以,使用圖像序列分析往往是比較有效的,而且適合于低信噪比的情況。由...
2025-06-26 -
 河南哪些目標跟蹤
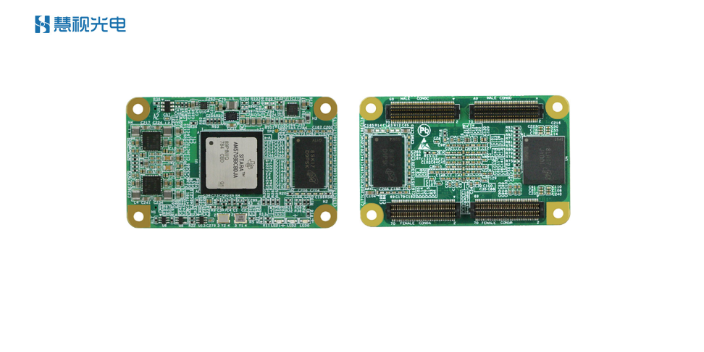
河南哪些目標跟蹤無人機的智能化是推動低空經濟發展的重要引擎,打造智能無人機需要通信、控制、傳感器等多種技術的共同作用,其中圖像處理板的目標檢測識別技術能夠在智慧巡檢、智慧交通管理、智慧河湖巡查等領域有著積極作用。在成都慧視開發的多款圖像處理板中,Viztra-LE026以小型...
2025-06-25 -
 多系統適配目標跟蹤推薦廠家
多系統適配目標跟蹤推薦廠家eVTOL是指電動垂直起降飛行器,大力開展eVTOL試點,是對低空經濟的強動力注入,而無人機正是這一領域的關鍵選擇之一。無人機在低空經濟中扮演者重要角色,隨著應用領域的不斷增多,未來無人機的數量將呈式增長,屆時eVTOL起降中心將聚集眾多各式各樣的無人機,如何...
2025-06-25 -
四川移動目標跟蹤
YOLO算法的關鍵技術在YOLO算法中,有幾個關鍵技術對其性能起著重要作用。首先是使用卷積神經網絡提取圖像特征,其中引入了一些先進的網絡結構,如Darknet。其次是使用AnchorBox來提高目標定位的精度。此外,YOLO算法還引入了特征金字塔網絡和多尺度預...
2025-06-25 -
 比較好的目標跟蹤有什么
比較好的目標跟蹤有什么無人機及其相關技術的不斷發展,已經打破了傳統的倉儲管理方式,為倉儲帶來了智能化的革新。傳統的倉儲管理,需要人工進行地毯式巡檢,這種方式效率低,費時費力。另外,對于倉儲安全的監管不能做到時效性,反應速度也具有滯后性。而全新的無人機巡檢模式,基于先進的圖像傳感器、...
2025-06-25 -
高性能目標跟蹤多少錢
低空經濟成為當下火熱的行業之一,各行各業都想利用無人機為自己服務,但是卻面臨一個問題,專業人才嚴重不足。有關數據顯示,我國無人機經營性企業已超過1.7萬家,全國實名登記的無人機已超過200萬架。而無人機人才的缺口卻多達100萬,這就給低空經濟的快速發展按下了慢...
2025-06-25 -
 云南視頻設備
云南視頻設備十一黃金周即將來臨,各地也將迎來新一輪的人流壓力大考。每到節假日,各大城市、旅游景點總是人山人海,人多了就會帶來隱患,因此這個時間也是維穩部門繁忙的時候。如何保障游客安穩愉快地的過節至關重要。當下,有關部門主要使用無人機進行安全維穩的輔助設備,無人機在城市安防...
2025-06-25 -
網絡目標跟蹤聯系方式
通常,遮擋可以分為三種情況:目標間遮擋、背景遮擋、自遮擋。對于目標之間的相互遮擋,可以選擇根據目標的位置和目標特征的先驗知識來處理這一問題。而對于場景結構的導致的部分遮擋此方法則難以判斷,因為難以辨認究竟是目標形狀發生變化還是發生遮擋。所以,處理遮擋問題的通用...
2025-06-25 -
 云南目標跟蹤檢測
云南目標跟蹤檢測無人機的迅猛發展,使得無人機的反制技術也水漲船高,常見的有電子干擾、無人機識別對抗等方式。后者采用圖像識別技術,通過在無人機攝像頭的基礎上加裝AI高性能圖像處理板,在算法的作用下,就具備無人機識別的功能,為無人機對抗創造條件。由于無人機飛行速度極快,因此針對于...
2025-06-25 -
 廣東目標跟蹤服務電話
廣東目標跟蹤服務電話無人機及其相關技術的不斷發展,已經打破了傳統的倉儲管理方式,為倉儲帶來了智能化的革新。傳統的倉儲管理,需要人工進行地毯式巡檢,這種方式效率低,費時費力。另外,對于倉儲安全的監管不能做到時效性,反應速度也具有滯后性。而全新的無人機巡檢模式,基于先進的圖像傳感器、...
2025-06-24 -
 湖南目標檢測應用
湖南目標檢測應用成都慧視推出的深度學習算法開發平臺SpeedDP,它的主要功能就是幫助進行算法模型的測試驗證,進行快速的針對大量數據的AI自動標注,然后提升自身算法能力。在無人機智能炮彈測試驗證中,通過對原始算法的模型訓練,能夠不斷評估算法的能力,然后對新的打擊數據集目標進行...
2025-06-24 -
湖南安全目標跟蹤
在很長一段時間內,傳統的糧庫害蟲檢查方法是依靠人工巡檢,用肉眼觀察,逐倉篩查的方法,這種方法覆蓋面不足且效率低下,篩查一次將耗費工作人員的大量時間精力。隨著技術的發展,AI化的篩查逐步采用,通過算法的AI識別實現自動化篩查。方法基于高像素高清攝像機,實時遠程監...
2025-06-24 -
 江西國產圖像處理板
江西國產圖像處理板在如今的作業中,無人機路面巡查替代傳統的人工巡查,展現出巨大的效率優勢。像高速施工工地這樣的環境下,施工方為了保障施工安全,就需要對施工范圍進行嚴格管控,傳統的人工巡查效率低,受限于地形、時間等問題,容易出現盲點。相比人工,利用無人機進行AI識別則可以逐幀圖像...
2025-06-24 -
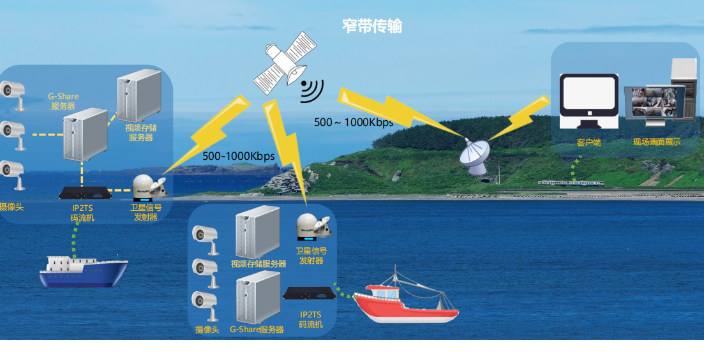 四川雙向對講視頻傳輸工具
四川雙向對講視頻傳輸工具我國的海上油氣開發正處于上升階段,將會陸陸續續出現有大量的鉆井平臺,這些平臺遠離大陸,處于弱網甚至無網環境,因此中海油鉆井平臺都是通過海底光纜進行通信,一方面是鉆井施工的需要,一方面是對在鉆井平臺工作的人員進行通信需求的保障。但是海底光纜通信的安全性不足,一旦...
2025-06-24 -
福建質量目標跟蹤
通常,遮擋可以分為三種情況:目標間遮擋、背景遮擋、自遮擋。對于目標之間的相互遮擋,可以選擇根據目標的位置和目標特征的先驗知識來處理這一問題。而對于場景結構的導致的部分遮擋此方法則難以判斷,因為難以辨認究竟是目標形狀發生變化還是發生遮擋。所以,處理遮擋問題的通用...
2025-06-24 -
 多系統適配目標檢測參考價格
多系統適配目標檢測參考價格城市濕地公園是“城市之肺”,是生態建設的重要一環,因此對于濕地公園的日常巡邏必不可少。但是大面積的濕地公園地形復雜交錯,許多區域依靠傳統的人工巡邏,無法到達。此外,人工巡邏的效率遠遠不夠,無法做到及時響應和精確記錄,久而久之,成本就不斷累計增加。無人機的落地應...
2025-06-24 -
 浙江目標跟蹤功效
浙江目標跟蹤功效無人機在農業領域能夠實現高效率的施肥、播種等操作。但是不同的作業環境對于無人機的工作性能要求不一樣,同樣的方案在平原地區適用,在高原地區就不行。因此針對于特殊作業環境需要制定不同的智慧化方案。像青藏高原這樣地貌復雜、低氣壓、大溫差的特點,參與智能化工作的各個部...
2025-06-24 -
黑龍江附近目標跟蹤
檢測器的輸出通常被用作跟蹤設備的輸入,跟蹤設備的輸出被提供給運動預測算法,該算法預測物體在接下來的幾秒鐘內將移動到哪里。然而,在無檢測跟蹤中,情況并非如此。基于DFT的模型要求必須在首幀中手動初始化固定數量的對象,然后必須在隨后的幀中對這些對象進行定位。D...
2025-06-24 -
山西邊海防圖像識別模塊目標檢測
無人機的智能化是推動低空經濟發展的重要引擎,打造智能無人機需要通信、控制、傳感器等多種技術的共同作用,其中圖像處理板的目標檢測識別技術能夠在智慧巡檢、智慧交通管理、智慧河湖巡查等領域有著積極作用。在成都慧視開發的多款圖像處理板中,Viztra-LE026以小型...
2025-06-24 -
陜西智慧交通AI智能煙霧識別
成都慧視推出的深度學習算法開發平臺SpeedDP,它的主要功能就是幫助進行算法模型的測試驗證,進行快速的針對大量數據的AI自動標注,然后提升自身算法能力。在無人機智能炮彈測試驗證中,通過對原始算法的模型訓練,能夠不斷評估算法的能力,然后對新的打擊數據集目標進行...
2025-06-24 -
 山西安防監控圖像識別模塊定制方案
山西安防監控圖像識別模塊定制方案夏季,為了消減酷暑的炎熱,下水消暑成了老老少少的選擇,這也就給溺水事故埋下了隱患。以前,人工巡視雖然能夠起到一定作用,但是仍不能避免時間差帶來的弊端,每當發現后可能就為時已晚。而利用無人機,則可以開展不間斷、高密度、大范圍的巡視工作,其靈活機動的特點在巡湖巡河...
2025-06-24 -
 電力應急目標跟蹤哪里買
電力應急目標跟蹤哪里買視頻自動跟蹤系統,一般都是用在露天的、較大地域范圍的監控系統中,且邊跟蹤邊錄像。在自動跟蹤系統的發展上,jun用上的視頻自動跟蹤、毫米波雷達跟蹤以及激光雷達跟蹤等是比較成熟的;非jun用領域,存在一些固定畫面、攝像機從不運動的的目標檢測與跟蹤系統;基于帶紅外線...
2025-06-24 -
信息化圖像處理板檢測
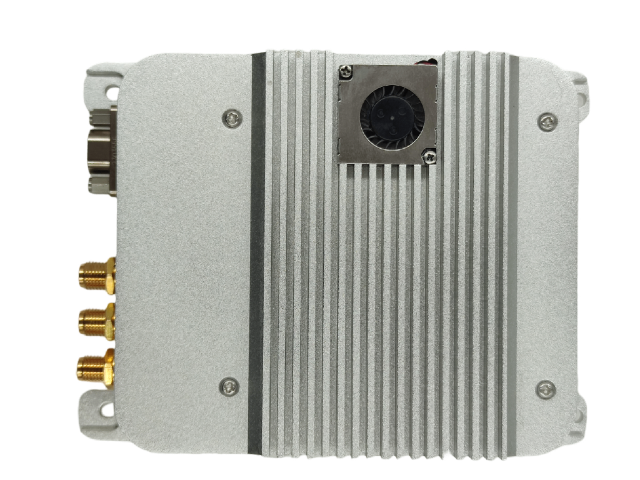
RK3588作為瑞芯微國產化旗艦級芯片,用在目標跟蹤領域,通常情況下跟蹤幀率都在50Hz左右,這已經足夠滿足大多數應用領域的需求。但在許多特殊領域,如軍備、邊防,高幀頻的視頻輸出能夠在極短的時間內捕捉到更多的畫面,實現高速動態場景的連續拍攝。高幀頻的目標跟蹤則...
2025-06-24 -
 江西目標跟蹤技術
江西目標跟蹤技術用檢測器模型去解決跟蹤問題,遇到的比較大問題是訓練數據不足。普通的檢測任務中,因為檢測物體的類別是已知的,可以收集大量數據來訓練。例如 VOC、COCO 等檢測數據集,都有著上萬張圖片用于訓練。而如果我們將跟蹤視為一個特殊的檢測任務,檢測物體的類別是由用戶在首...
2025-06-24 -
 甘肅比較好的目標檢測
甘肅比較好的目標檢測傳統的吊艙只能如上述那樣工作,而要打造更加智能化的邊海防無人機巡邏,則可以在光電吊艙中植入高性能的圖像處理板,通過目標識別、檢測算法的賦能,就能夠讓無人機實現目標識別檢測、目標鎖定跟蹤等功能。為了進行有效結合,成都慧視開發了多塊高性能的具備圖像處理能力的光電吊...
2025-06-24 -
附近目標跟蹤哪里好
視頻監控中的多目標跟蹤(MTT)是一項重要而富有挑戰性的任務,由于其在各個領域的潛在應用而引起了研究人員的大量關注。多目標跟蹤任務需要在每幀中單獨定位目標,這仍然是一個巨大的挑戰,因為目標的外觀會立即發生變化,并且會出現極端的遮擋。除此之外,多目標跟蹤框架需要...
2025-06-24 -
寧夏多系統適配目標跟蹤
傳統意義上的根據視頻的變化率報警,隨著由于計算機的廣泛應用和數字圖像的發展,由于其設置的不靈活、虛警率高、不抗干擾及接口等方面的原因,正慢慢地面臨淘汰;另外,在重要的場所,比如具有戰略意義的油田油庫,*倉庫,重要的機密場所、辦公地點,水利大壩等等,傳統意義上的...
2025-06-24