天津臨時機器人
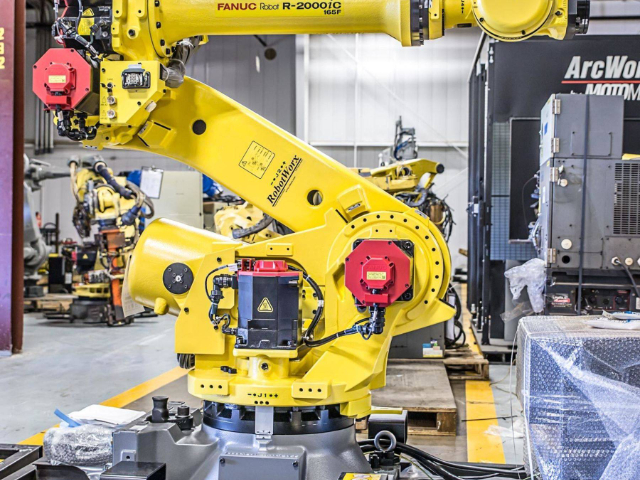
感知是機器人與外界交互的重要環節。通過編程,機器人可以利用各種傳感器,如攝像頭、激光雷達、超聲波傳感器等,收集周圍環境的信息。然后,運用圖像處理、數據分析等技術,對這些信息進行處理和理解。比如,自動駕駛汽車通過感知周圍的車輛、行人、道路標志等,做出合理的駕駛決策。決策能力是機器人編程的關鍵之一。基于感知到的信息,機器人需要根據預設的目標和規則,做出比較好的決策。這涉及到復雜的邏輯判斷、概率計算和優化算法。例如,在物流配送中,機器人需要根據貨物的重量、體積、目的地等因素,規劃出比較好的運輸路徑。工業機器人的高效運作推動了制造業的快速發展。天津臨時機器人

機器人編程還需要考慮倫理和法律問題。隨著機器人的應用越來越普遍,如何確保機器人的行為符合倫理和法律規范,成為了一個亟待解決的問題。例如,在兵用領域使用的機器人,必須遵循國際法和人道主義原則;在服務領域使用的機器人,要保護用戶的隱私和數據安全。為了應對這些挑戰,研究人員和工程師們正在不斷探索新的技術和方法。人工智能和機器學習技術的發展為機器人編程帶來了新的思路。通過使用深度學習算法,機器人可以從大量的數據中學習和總結經驗,提高自身的決策能力和適應性。大連機器人培訓教育機器人可以通過游戲化的方式提高學生的學習積極性。

例如,在一個物流分揀機器人的調試中,如果發現機器人在分揀過程中出現錯誤或者速度較慢,調試人員會分析數據,可能是圖像識別算法的精度不夠,或者是機械臂的運動控制不夠精細。然后,他們會對相應的部分進行重新調試和優化,再次進行測試,直到機器人達到理想的工作狀態。在調試過程中,環境因素的影響也需要充分考慮。不同的溫度、濕度、光照條件以及電磁干擾等,都可能對機器人的性能產生影響。因此,調試人員需要在各種可能的環境條件下進行測試,確保機器人在不同的工作場景中都能穩定運行。
以自動駕駛汽車中的激光雷達為例,調試人員需要對其進行角度校準、距離測量精度的測試以及數據傳輸的穩定性檢查。只有當激光雷達能夠準確地感知周圍的障礙物和道路狀況,并將這些信息及時、準確地傳遞給汽車的控制系統,自動駕駛功能才能得以可靠實現。軟件程序是機器人的“大腦”,對其進行調試是整個調試過程的關鍵之一。這包括對控制算法的優化、程序邏輯的檢查以及與硬件的協同工作測試。控制算法決定了機器人的運動軌跡、動作順序和力度控制等關鍵參數,調試人員需要通過不斷的實驗和調整,使機器人的動作更加流暢、高效和精細。水下機器人的通訊技術不斷改進,數據傳輸更加穩定。
在當今科技驅動的世界中,機器人正逐漸成為各行各業的重要力量。從工業生產到醫療保健,從物流配送再到科學探索,機器人的身影無處不在。然而,要使這些機器人能夠高效、準確地執行任務,機器人調試這一關鍵環節起著至關重要的作用。機器人調試,簡而言之,是對機器人系統進行各種設置、校準和優化,以確保其能夠按照預期的方式運行。這一過程涉及到多個方面,包括機械結構、電子硬件、軟件程序以及與周邊環境的交互等。機器人調試的第一步通常是對機械結構的檢查和調整。這包括確保機器人的各個關節活動自如,沒有卡頓或異常摩擦;檢查傳動部件,如皮帶、鏈條和齒輪的張緊度和磨損情況;以及確認機械部件的安裝牢固性,防止在運行過程中出現松動或移位。太空機器人可以在太空中進行設備維修和維護工作。吉林機器人調試
家用機器人的功能不斷豐富,滿足人們日益增長的需求。天津臨時機器人
在軟件調試過程中,安全性的考量貫穿始終。隨著機器人與人類的交互日益密切,軟件必須確保機器人的行為不會對人類造成傷害。調試人員需要對機器人的動作范圍、力量控制等進行嚴格的限制和監測。例如,在服務機器人與人互動的場景中,軟件要能夠實時感知人體的位置和姿態,防止機器人在運動過程中與人發生碰撞,造成意外傷害。為了提高調試效率,調試人員會借助一系列先進的工具和技術。自動化測試框架可以快速執行大量的測試用例,節省人力和時間。代碼審查工具可以幫助發現潛在的代碼缺陷和風格問題。而版本控制系統則方便調試人員對不同版本的軟件進行管理和比較,追溯問題的根源。此外,基于云計算的調試平臺能夠提供強大的計算資源,支持大規模的數據處理和模擬實驗,加速調試進程。天津臨時機器人
- 泰州提升機設備維修 2025-02-06
- 長春上位機開發直播課程 2025-02-06
- 鎮江臨時機器人 2025-02-06
- 西寧上位機開發外包 2025-02-06
- 蕪湖外包機構設計 2025-02-06
- 長沙設計整包直播 2025-02-06
- 嘉興非標自動化設計學習 2025-02-06
- 臺州臨時設備改造 2025-02-06
- 南京非標自動化設計就業 2025-02-06
- 南通非標自動化設計在哪找 2025-02-06
- 南京dtro膜元件供求信息 2025-02-06
- 河南換電柜供應商 2025-02-06
- 蘇州工業創新設計介紹 2025-02-06
- 長春得帆ipaas 2025-02-06
- 江蘇附近的心理咨詢電話 2025-02-06
- 寧波如何合規賬分布 2025-02-06
- 項目儒商產業聯盟多少錢 2025-02-06
- 江陰申請進出口代理 2025-02-06
- 貴陽怎樣技校包括 2025-02-06
- 應城打撈公司 2025-02-06