江蘇精密力控打磨技術指導
智能力控打磨力控打磨應用于批量性中小工件去毛刺、去飛邊、倒棱角、除銹、去氧化皮、電鍍前處理、及去除加工刀紋、工件表面光亮拋光,鏡面拋光等。特別適合一些形狀復雜、微型精密零件、異型易變形薄臂、窄縫、薄片工的件拋光難題。智能力控打磨力控打磨對大優點是,在打磨拋光過程中柔性控制打磨力的大小,拋光后不改變工件尺寸精度,外觀及手感顯著提高,是一些手工拋光、或進口拋光設備無法達到的拋光效果。目前已經應用于中小型零件批量生產加工,完全取代了落后的傳統拋光工藝,拋光效率、效益提高。智能力控打磨力控打磨已泛用于機械制造、電子零部件、儀表儀器、輕工、鐘表零件、航天、紡織器材專件、汽車零部件、軸承行業、醫療器械、精密件、粉末冶金、五金沖壓、工藝品、工具等多種行業領域。對于中小型精密工件去毛刺、去飛邊、倒角、除銹、去氧化皮、去除加工紋痕、拋光、精拋光、鏡面拋光等性能顯著提高,可完全取代或超越昂貴的進口拋光設備,國內眾多生產型企業直接受益。大儒科技是以研發、生產、銷售為一體的科技型企業,致力于智能力控打磨力控打磨的研發、設計、生產,專業解決各種工件拋光技術難題。大儒科技(蘇州)有限公司力于提供力控打磨 ,有想法可以來我司咨詢。江蘇精密力控打磨技術指導
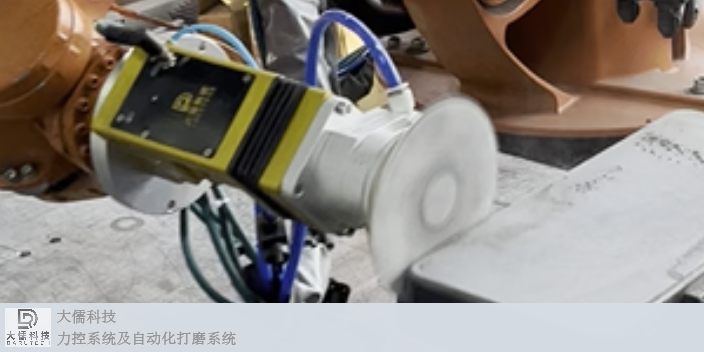
產品均一性差。尤其是打磨現場的噪聲和粉塵污染對工人的傷害特別大。基于力控的打磨拋光機器人能夠實現高效率、高質量的自動化打磨,是替代人工打磨的行之有效的解決方案。力控打磨機器人系統由以下幾部分組成:工業機器人、六維力-力矩傳感器、打磨工具、工作臺、路徑規劃與力控反饋軟件系統及PC機。力控打磨機器人主要是打磨力控制技術,通過控制加工軌跡和打磨工具與工件的接觸力,以滿足力和位置兩方面的工藝要求,保證打磨質量。大儒科技的力控打磨系統通過力控制系統控制打磨加工過程,使機器人具備了良好的對接觸力感知和控制能力,實現了高效率高質量的自動化打磨過程。用途實時監控、力控反饋、精密微調、穩定高效。廈門直銷力控打磨裝置力控打磨 ,就選大儒科技(蘇州)有限公司,讓您滿意,有想法可以來我司咨詢!

鈑金具有重量輕、強度高、導電(能夠用于電磁屏蔽)、成本低、大規模量產性能好等特點,在電子電器、通信、汽車工業、醫療器械等領域應用較多,例如在電腦機箱、手機、mp3中,鈑金是必不可少的組成部分,鈑金件的設計變成了產品開發過程中很重要的一環,在對鈑金進行打磨過程中,會產生大量的細塵飛揚,這些細塵飛揚嚴重影響工作環境,而且細塵容易被吸入工作者的身體內,對工作者的身體健康造成影響,并且如今的鈑金打磨機對圓形鈑金件不能很好的固定,如果打磨時鈑金件固定不穩,容易造成安全事故。DFC力控打磨使得鈑金加工過程實現柔性力控打磨,解決打磨自動化。對比柔性力控打磨的施工工藝――柔性力控打磨提供更加環保、安全的工作環境,打磨后工件批量表面光滑、細膩、平整,效果更加均勻、一致,配合使用不同粒度砂紙,達到鈑金焊縫打磨賀表面砂光打磨效果。
隨著社會的發展和科技的進步,人們對工件的外觀面要求逐漸變高,因此需要對工件進行打磨工藝,當需要打磨大批量工件,而且工件的內壁面和外壁面同時都需要打磨時,如果采用傳統的流水線制作模式,通過人工打磨效率低,同時打磨后的效果得不到保證,綜合成本高,且打磨后的碎屑容易殘留在工件上,不利于標準化生產。目前在工件加工完成后經常需要使用打磨機對其包面進行打磨,使其表面光滑均勻。現有的打磨機一般均為手持式打磨機,工作人員需要手持打磨機然后對工件表面進行打磨處理。這種方式存在以下缺陷:在面對圓柱形桿或者是圓柱形管等圓形形的工件時,因為工件表面均為弧面,工作人員對工件打磨時比較費力,且打磨出來的工件表面很難保持平整性,很有可能影響后續工件的使用。針對現有技術存在的不足,大儒的只能力控打磨力控打磨具有的打磨過程中的柔性力控制,能幫助工作人員更方便打磨圓柱形工件。大儒科技(蘇州)有限公司是一家專業提供力控打磨 的公司,歡迎新老客戶來電!

電氣柜制作材料一般分為熱軋鋼板和冷軋鋼板兩種。冷軋鋼板相對熱軋鋼板更材質柔軟,更適合電氣柜的制作。電氣柜用途主要用于化工行業,環保行業,電力系統,冶金系統,工業,核電行業,消防安全監控,交通行業等等。在電氣柜加工過程中涉及切割、沖孔、拋光和打磨等工藝,傳統的拋光方式是操作人員手持拋光機對板材進行拋光,由于人手持拋光機,無法控制一直走直線,導致拋光效果不佳,實用性較低。打磨力控打磨安裝在機器人上,力控打磨可使拋光面均勻平整,提高拋光質量,提高工作效率。打磨力控打磨其安裝方式、連接方式或設置方式均很簡單,客戶的技術人員只需按照其附帶的使用說明書進行安裝和操作即可快速投入打磨生產。力控打磨 ,就選大儒科技(蘇州)有限公司。鄭州力控打磨詳情
力控打磨 ,就選大儒科技(蘇州)有限公司,用戶的信賴之選,有需求可以來電咨詢!江蘇精密力控打磨技術指導
鑄件去毛刺去毛刺機器人工作分為接觸性和非接觸性兩類。非接觸性作業如噴涂和弧焊,這類機器人對軌跡位置控制精度的要求不高,但對于接觸式作業,比如裝配、打磨,如果還是按照傳統的位置控制的話,就會出現偏差,導致容易導致過磨削或欠磨削。由此,我們不得不提到柔順控制,柔順控制也分為主動型和被動型,鑄件去毛刺常用被動型柔順控制。在機器人末端會添加一個柔順機構,當末端執行器與工件發生接觸時,末端柔順執行器能夠調整機器的運動軌跡,從而實現力控。如常用的彈簧(橡皮)浮動和氣浮動力控打磨頭,當接觸力過大時,打磨頭會遠離工件的方向進行偏移運動,當接觸力過小時,打磨頭會靠近工件方向運動,從而實現衡力打磨。而閉環控制器+浮動順隨補償器和伺服電主軸的出現又將這種柔順控制升級了,更好的實現了軌跡位置補償和加工速度控制。江蘇精密力控打磨技術指導
- 揚州柔性打磨供應商 2025-02-08
- 黃山柔性打磨哪里買 2025-02-08
- 鹽城柔性打磨技術指導 2025-02-08
- 力補償力控系統企業 2025-02-08
- 無錫便宜柔性打磨 2025-02-08
- 揚州柔性打磨必看 2025-02-08
- 原裝力控系統型號 2025-02-07
- 太倉**柔性打磨 2025-02-07
- 恒力力控系統答疑解惑 2025-02-07
- 打磨力控系統性價比高 2025-02-07
- 平機改造提花開口價格怎么樣 2025-02-08
- 惠州動力刀塔機數控機床直銷 2025-02-08
- 江蘇汽車零部件精密五金加工廠 2025-02-08
- 陜西國內掃描顯微鏡供應商家 2025-02-08
- 江蘇臥式數控車床多少錢一臺 2025-02-08
- 玻璃蛋糕中島柜供貨報價 2025-02-08
- 湖南裝箱機批發價格 2025-02-08
- 南京定做鈑金機械加工自研廠家 2025-02-08
- 嘉興紡織倍捻機 2025-02-08
- 山東內能膠套廠家 2025-02-08